
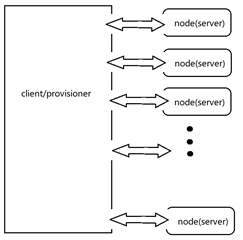
I have an application scenario where a client can communicate with more than 30 nodes in both directions. Which demo should I refer to?
I have an application scenario where a client can communicate with more than 30 nodes in both directions. Which demo should I refer to?

