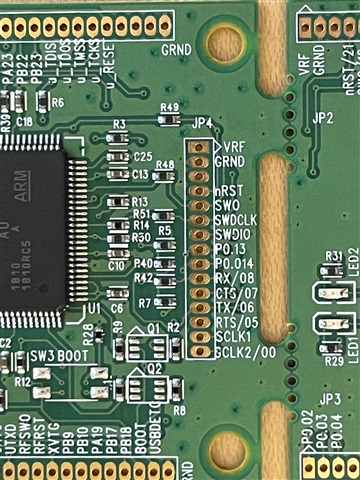
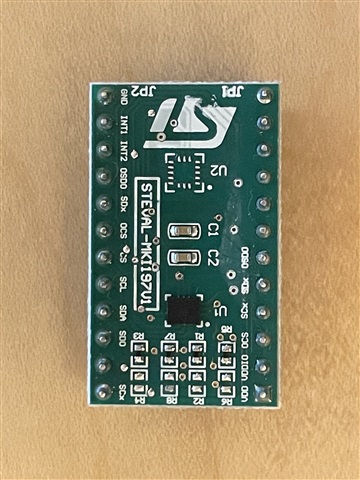
We want to physically connect our nRF muRata dk (WSM-BL241-ADA-008DK) to the ST Accelerometer eval board (STEVAL-MKI197V1). We are assuming the connection takes place on the JP4 pads but can't find a 3.3v power output pin and don't want to guess. The goal is to write firmware using nRF Connect and define interrupts on the nRF board for inbound Accelerometer changes. We want to test both spi and i2c
Any one have experience here? thank you!