Hello,
I am using nRF connect SDK v1.4.99-dev1. I have imported ZigBee light_bulb, light_switch,network_coordinator project in SEGGER and successfully created
the Zigbee network and control the light_buld with light_switch.
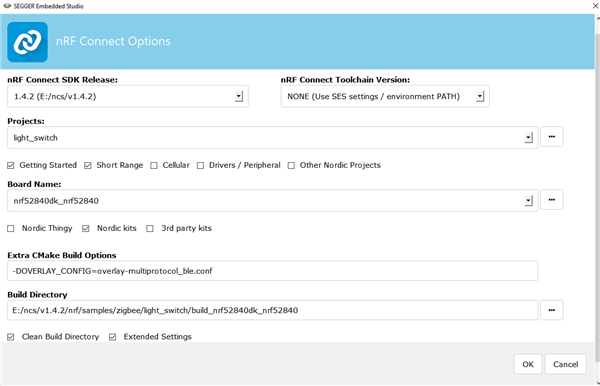
I want to enable multiprotocol support in Zigbee.
In this link Multiprotocol support — nRF Connect SDK 1.4.99 documentation (nordicsemi.com) they suggest the following method
Enabling multiprotocol support
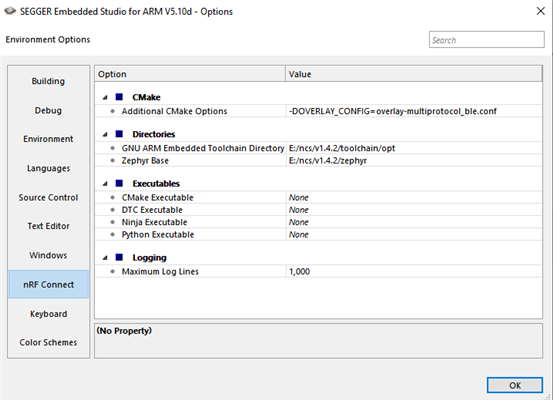
To enable the multiprotocol support for either Thread or Zigbee, set the following Kconfig option: CONFIG_BT_LL_SOFTDEVICE_DEFAULT
But I am not getting How to add this and how to test the multiprotocol example.
Can you please help me to resolve this issue?
Thank you,
Pranav.