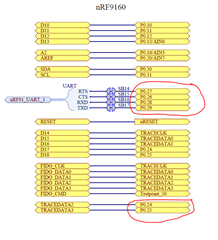
I've been trying to configure a second UART for use on the nRF9160 DK. However, I'm having some issues getting anything to send over the UART. I feel like I'm missing something simple. I configured and setup UART0 to PO.10, 11, 12, and 13 on the DK. I then setup UART1 to PO.14, 15, 16, and 20. I am able to send strings and print them out to UART0 (along with all the normal boot up messages and prink status messages that's default to UART0). But I can't seem to get anything to on UART1.
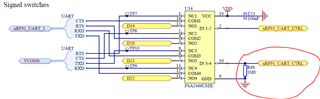
For my test setup I have two serial to FTDI USB converters that are connected to a terminal program so I can watch for any outputs. I have modified both the overlay files for the SPM in the sample folder and also for my custom code. I've also checked the .dts files after I've compiled in the build folder and it looks to be configured correctly. So I'm not sure why I am unable to actually send something.
I started with the UART code example from Github and modified from there. Running my code below results in UART0 outputting correctly but nothing being output on UART1. My ultimate goal is to read character stings that I'll be sending to UART1 via my terminal program. If I try to send anything to UART1, it appears to be ignored and I see no calls to the uart_cb1() function I have. However, it is working for UART0. If send a message from my terminal program to the nRF9160, I see uart_cb0() called and the data is repeated back to me over UART0.
I started with the uart example on Github here: https://github.com/Rallare/fw-nrfconnect-nrf/blob/nrf9160_samples/samples/nrf9160/uart/src/main.c#L31
And I've gone through some of the devzone tickets:
https://devzone.nordicsemi.com/f/nordic-q-a/44470/nrf9160-dk-gpio-uart
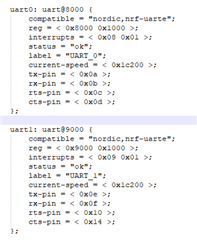
.DTS file
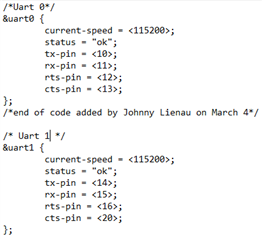
overlay file
My Code:
#include <zephyr.h>
#include <misc/printk.h>
#include <uart.h>
#include <string.h>
#include <stdlib.h>
static u8_t uart_buf[1024];
static char *command0 = "This Is A Test of UART0\r\n";
static char *command1 = "This Is A Test of UART1\r\n";
u8_t i = 0;
void uart_cb0(struct device *x)
{
uart_irq_update(x); //start processing interrupts in the ISR
int data_length = 0;
if (uart_irq_rx_ready(x)) { //check if UART RX buffer has a received char
data_length = uart_fifo_read(x, uart_buf, sizeof(uart_buf)); //read ata from FIFO
uart_buf[data_length] = 0;
}
printk("%s", uart_buf);
}
void uart_cb1(struct device *x)
{
uart_irq_update(x);
int data_length = 0;
if (uart_irq_rx_ready(x)) {
data_length = uart_fifo_read(x, uart_buf, sizeof(uart_buf));
uart_buf[data_length] = 0;
}
printk("%s", uart_buf);
}
void uart_send_str(struct device *uart, char *str){
printk("callback!\r\n");
u32_t len = strlen(str);
while (len--) {
uart_poll_out(uart, *str++);
}
}
void main(void)
{
printk("Hello World\n");
struct device *uart0 = device_get_binding("UART_0");
uart_irq_callback_set(uart0, uart_cb0);
uart_irq_rx_enable(uart0);
printk("uart0 ready\n");
struct device *uart1 = device_get_binding("UART_1");
uart_irq_callback_set(uart1, uart_cb1);
uart_irq_rx_enable(uart1);
printk("uart1 ready\n");
printk("UART loopback start!\n");
while (1) {
uart_send_str(uart0, command0);
uart_send_str(uart1, command1);
k_cpu_idle();
}
}