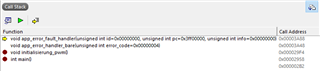
I try to execute the PWM settings via the library in an extra .h/.c file to keep my main method as small as possible. Unfortunately the program sticks in the ErrCheck and does not execute the PWM. Unfortunately I can not find the error and there is no error displayed when building and transferring.
Here you can see the funktionen_pwm.c file:

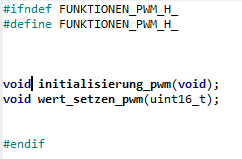
This is the associated funktionen_pwm.h file:
And this is the main.c :

I hope someone can help me with this error.
Greetings