
Hi,
I just want to add SPI to my BLE project to read some data from my gyro, but after spi's addition, the code doesn't work normally anymore. I print a log in the cycle of main function, after add spi, the circulation in main function just cycle limited times.
Before adding spi, i've defined a timer and timerout handler existed, but after spi's addition, the code can't enter the " timerout_handler" function, because i found some logs i've defined in " timerout_handler" didn't print and display.
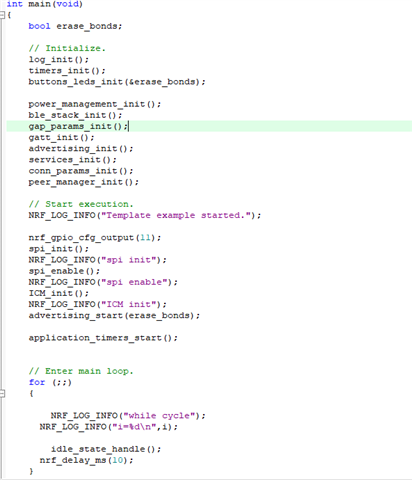
main function:
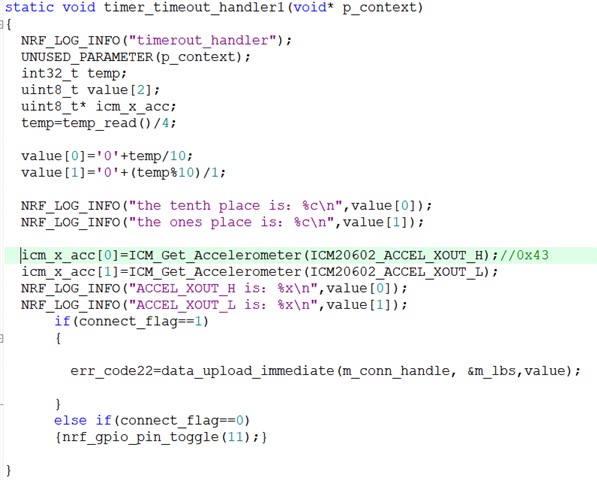
timer_handler:
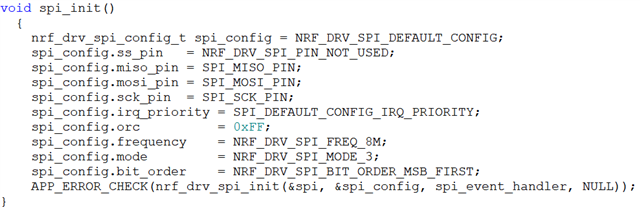
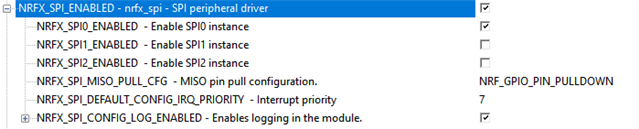
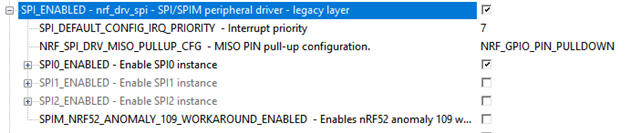
Settings related to spi:
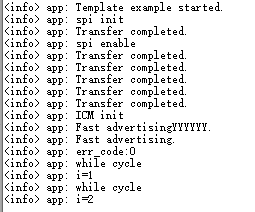
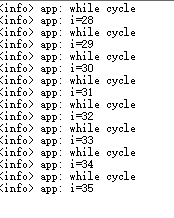
the LOG sequence: it stop print when "i" in increase to 35
If anyone have some opinions ?
best regards,
jerry


