Hi everyone,
Im working and learning for private project CAN bus sniffer which when receive some data trigger some relay...
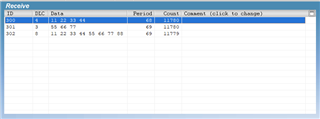
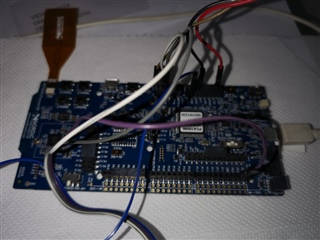
I have mcp2515_can hw-184 board on which Im replace TJA1050 chip for SN65HVD230. Im add J1 jumper to connect 120ohm resistor. Then Im connect on other side Lawicel CANUSB device together with CANHack software and open 500k CAN connection and periodicly send some data...
Im try few MCP2515 library written in C but looks like none of them do not work or maybe Im do something wrong... I don't have any special tool to analyze frequency on SPI interface...
I use in software:
SPI_SCK_PIN = P0.26
SPI_MISO_PIN = P0.30
SPI_MOSI_PIN = P0.29
SPI_SS_PIN = P0.31
Connections:
MCP2515 <-> NRF52840 PDK
INT - No connection
SCK <-> P0.26
SI <-> P0.29
SO <-> P0.30
CS <-> P0.31
GND <-> GND
VCC <-> VDD
MCP2515:

NRF52840:

Any hint what to check that I will be sure that SPI interface and connections are ok and I have only software problems? Or is here some working MCP2515 library compatible with NRF5 SDK 17.0.2 ? Or maybe can I somehow change SPI example to test that MCP2515 realy work? I will and I use Softdevice S140(BLE peripheral) if this is important...
Thanks for any help.