
Trying to get the provided (Zephyr) TI_HDC Sample running on my nRF5340. Having issues where it doesn't want to bind regardless of address I specify or pins I use. I created my own overlay according to the board. I will post my project files below.
I can run the i2c_scan sample and see it: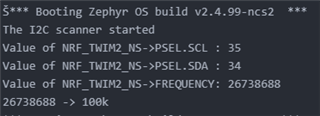
Running/building using:
west build -b nrf5340dk_nrf5340_cpuappns && west flash
I noticed that I get this when building, it is saying it is switching to a secure build instead of my specified NS? Not sure if this is a related issue.
$ west build -b nrf5340dk_nrf5340_cpuappns && west flash [0/1] Re-running CMake... Including boilerplate (Zephyr base (cached)): C:/Users/jansens/ncs/v1.5.1/zephyr/cmake/app/boilerplate.cmake -- Application: C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy -- Using NCS Toolchain 1.5.1 for building. (C:/Users/jansens/ncs/v1.5.1/toolchain/cmake) -- Zephyr version: 2.4.99 (C:/Users/jansens/ncs/v1.5.1/zephyr) -- Found west (found suitable version "0.9.0", minimum required is "0.7.1") -- Board: nrf5340dk_nrf5340_cpuappns -- Cache files will be written to: C:/Users/jansens/ncs/v1.5.1/zephyr/.cache -- Found dtc: C:/Users/jansens/ncs/v1.5.1/toolchain/opt/bin/dtc.exe (found suitable version "1.4.7", minimum required is "1.4.6") -- Found toolchain: gnuarmemb (C:/Users/jansens/ncs/v1.5.1/toolchain/opt) -- Found BOARD.dts: C:/Users/jansens/ncs/v1.5.1/zephyr/boards/arm/nrf5340dk_nrf5340/nrf5340dk_nrf5340_cpuappns.dts -- Found devicetree overlay: C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy/nrf5340dk_nrf5340_cpuappns.overlay -- Generated zephyr.dts: C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy/build/zephyr/zephyr.dts -- Generated devicetree_unfixed.h: C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy/build/zephyr/include/generated/devicetree_unfixed.h -- Generated device_extern.h: C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy/build/zephyr/include/generated/device_extern.h Parsing C:/Users/jansens/ncs/v1.5.1/zephyr/Kconfig Loaded configuration 'C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy/build/zephyr/.config' Configuration saved to 'C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy/build/zephyr/.config' Kconfig header saved to 'C:/Users/jansens/Tecovan/dev_projects/ti_hdc_copy/build/zephyr/include/generated/autoconf.h' Changed board to secure nrf5340dk_nrf5340_cpuapp (NOT NS)
My project files:
CMakeLists.txt
# SPDX-License-Identifier: Apache-2.0
cmake_minimum_required(VERSION 3.13.1)
find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE})
project(ti_hdc)
FILE(GLOB app_sources src/*.c)
target_sources(app PRIVATE ${app_sources})
nrf5340dk_nrf5340_cpuappns.overlay:
&i2c2 {
compatible = "nordic,nrf-twim";
status = "okay";
sda-pin = < 30 >;
scl-pin = < 31 >;
clock-frequency = <I2C_BITRATE_STANDARD>;
ti_hdc: ti_hdc@41 {
compatible = "ti,hdc","ti,hdc2022";
reg = <0x41>;
label = "HDC2022";
};
};prj.conf:
CONFIG_ASSERT=y # validation CONFIG_I2C=y CONFIG_GPIO=y CONFIG_SENSOR=y CONFIG_TI_HDC=y
sample.yml:
sample:
name: TI HDC Humidity/Temperature Sensor
tests:
sample.sensor.ti_hdc:
harness: sensor
platform_allow: reel_board nucleo_l496zg
tags: sensors
depends_on: i2c
main.c:
/*
* Copyright (c) 2019 Centaur Analytics
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr.h>
#include <device.h>
#include <drivers/sensor.h>
#include <sys/printk.h>
#include <sys/__assert.h>
#include <logging/log.h>
#include <drivers/gpio.h>
void main(void)
{
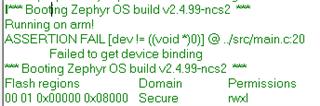
printk("Running on %s!\n", CONFIG_ARCH);
const struct device *dev = device_get_binding(DT_LABEL(DT_INST(0, ti_hdc)));
__ASSERT(dev != NULL, "Failed to get device binding");
printk("Dev %p name %s is ready!\n", dev, dev->name);
struct sensor_value temp, humidity;
while (1) {
/* take a sample */
printk("Fetching...\n");
sensor_sample_fetch(dev);
sensor_channel_get(dev, SENSOR_CHAN_AMBIENT_TEMP, &temp);
sensor_channel_get(dev, SENSOR_CHAN_HUMIDITY, &humidity);
/* print the result */
printk("Temp = %d.%06d C, RH = %d.%06d %%\n",
temp.val1, temp.val2, humidity.val1, humidity.val2);
/* wait for the next sample */
k_sleep(K_SECONDS(10));
}
}
I've followed/read the nRF Connect SDK Tutorial - Part 3 | NCS v1.5.0 which goes over the BME280 example a little. I have tried modify that example to work with the TI sensor instead but had similar issues where it doesn't bind.
Not really sure how to proceed here, any help is welcome. I've done other things I'm forgetting but this is the gist of my issue.
Edit: Here is my zephyr.dts output:
/dts-v1/;
/ {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
model = "Nordic NRF5340 DK NRF5340 Application";
compatible = "nordic,nrf5340-dk-nrf5340-cpuapp";
chosen {
zephyr,flash-controller = &flash_controller;
zephyr,entropy = &cryptocell_sw;
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
zephyr,uart-mcumgr = &uart0;
zephyr,bt-mon-uart = &uart0;
zephyr,bt-c2h-uart = &uart0;
zephyr,ipc_shm = &sram0_shared;
zephyr,sram = &sram0_ns;
zephyr,flash = &flash0;
zephyr,code-partition = &slot0_ns_partition;
};
aliases {
led0 = &led0;
led1 = &led1;
led2 = &led2;
led3 = &led3;
sw0 = &button0;
sw1 = &button1;
sw2 = &button2;
sw3 = &button3;
};
soc {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
compatible = "nordic,nRF5340-CPUAPP-QKAA", "nordic,nRF5340-CPUAPP", "nordic,nRF53", "simple-bus";
interrupt-parent = < &nvic >;
ranges;
nvic: interrupt-controller@e000e100 {
compatible = "arm,v8m-nvic";
reg = < 0xe000e100 0xc00 >;
interrupt-controller;
#interrupt-cells = < 0x2 >;
arm,num-irq-priority-bits = < 0x3 >;
phandle = < 0x1 >;
};
systick: timer@e000e010 {
compatible = "arm,armv8m-systick";
reg = < 0xe000e010 0x10 >;
status = "disabled";
};
sram0: memory@20000000 {
compatible = "mmio-sram";
reg = < 0x20000000 0x80000 >;
};
sram1: memory@21000000 {
compatible = "mmio-sram";
reg = < 0x21000000 0x10000 >;
};
peripheral@40000000 {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
ranges = < 0x0 0x40000000 0x10000000 >;
flash_controller: flash-controller@39000 {
compatible = "nordic,nrf53-flash-controller";
reg = < 0x39000 0x1000 >;
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
label = "NRF_FLASH_DRV_NAME";
flash0: flash@0 {
compatible = "soc-nv-flash";
label = "NRF_FLASH";
erase-block-size = < 0x1000 >;
write-block-size = < 0x4 >;
reg = < 0x0 0x100000 >;
partitions {
compatible = "fixed-partitions";
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
boot_partition: partition@0 {
label = "mcuboot";
reg = < 0x0 0x10000 >;
};
slot0_partition: partition@10000 {
label = "image-0";
reg = < 0x10000 0x40000 >;
};
slot0_ns_partition: partition@50000 {
label = "image-0-nonsecure";
reg = < 0x50000 0x30000 >;
};
slot1_partition: partition@80000 {
label = "image-1";
reg = < 0x80000 0x40000 >;
};
slot1_ns_partition: partition@c0000 {
label = "image-1-nonsecure";
reg = < 0xc0000 0x30000 >;
};
scratch_partition: partition@f0000 {
label = "image-scratch";
reg = < 0xf0000 0xa000 >;
};
storage_partition: partition@fa000 {
label = "storage";
reg = < 0xfa000 0x6000 >;
};
};
};
};
adc: adc@e000 {
compatible = "nordic,nrf-saadc";
reg = < 0xe000 0x1000 >;
interrupts = < 0xe 0x1 >;
status = "okay";
label = "ADC_0";
#io-channel-cells = < 0x1 >;
};
dppic: dppic@17000 {
compatible = "nordic,nrf-dppic";
reg = < 0x17000 0x1000 >;
status = "okay";
label = "DPPIC";
};
egu0: egu@1b000 {
compatible = "nordic,nrf-egu";
reg = < 0x1b000 0x1000 >;
interrupts = < 0x1b 0x1 >;
status = "okay";
};
egu1: egu@1c000 {
compatible = "nordic,nrf-egu";
reg = < 0x1c000 0x1000 >;
interrupts = < 0x1c 0x1 >;
status = "okay";
};
egu2: egu@1d000 {
compatible = "nordic,nrf-egu";
reg = < 0x1d000 0x1000 >;
interrupts = < 0x1d 0x1 >;
status = "okay";
};
egu3: egu@1e000 {
compatible = "nordic,nrf-egu";
reg = < 0x1e000 0x1000 >;
interrupts = < 0x1e 0x1 >;
status = "okay";
};
egu4: egu@1f000 {
compatible = "nordic,nrf-egu";
reg = < 0x1f000 0x1000 >;
interrupts = < 0x1f 0x1 >;
status = "okay";
};
egu5: egu@20000 {
compatible = "nordic,nrf-egu";
reg = < 0x20000 0x1000 >;
interrupts = < 0x20 0x1 >;
status = "okay";
};
i2s0: i2s@28000 {
compatible = "nordic,nrf-i2s";
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x28000 0x1000 >;
interrupts = < 0x28 0x1 >;
status = "disabled";
label = "I2S_0";
};
ipc: ipc@2a000 {
compatible = "nordic,nrf-ipc";
reg = < 0x2a000 0x1000 >;
interrupts = < 0x2a 0x1 >;
status = "okay";
label = "IPC";
};
kmu: kmu@39000 {
compatible = "nordic,nrf-kmu";
reg = < 0x39000 0x1000 >;
interrupts = < 0x39 0x1 >;
status = "okay";
};
pdm0: pdm@26000 {
compatible = "nordic,nrf-pdm";
reg = < 0x26000 0x1000 >;
interrupts = < 0x26 0x1 >;
status = "disabled";
label = "PDM_0";
};
regulators: regulator@4000 {
compatible = "nordic,nrf-regulators";
reg = < 0x4000 0x1000 >;
status = "okay";
};
vmc: vmc@81000 {
compatible = "nordic,nrf-vmc";
reg = < 0x81000 0x1000 >;
status = "okay";
};
uart0: uart@8000 {
compatible = "nordic,nrf-uarte";
reg = < 0x8000 0x1000 >;
interrupts = < 0x8 0x1 >;
status = "okay";
label = "UART_0";
current-speed = < 0x1c200 >;
tx-pin = < 0x14 >;
rx-pin = < 0x16 >;
rts-pin = < 0x13 >;
cts-pin = < 0x15 >;
};
uart1: uart@9000 {
compatible = "nordic,nrf-uarte";
reg = < 0x9000 0x1000 >;
interrupts = < 0x9 0x1 >;
status = "disabled";
label = "UART_1";
};
uart2: uart@b000 {
compatible = "nordic,nrf-uarte";
reg = < 0xb000 0x1000 >;
interrupts = < 0xb 0x1 >;
status = "disabled";
label = "UART_2";
};
uart3: uart@c000 {
compatible = "nordic,nrf-uarte";
reg = < 0xc000 0x1000 >;
interrupts = < 0xc 0x1 >;
status = "disabled";
label = "UART_3";
};
i2c0: i2c@8000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x8000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0x8 0x1 >;
status = "disabled";
label = "I2C_0";
};
i2c1: i2c@9000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x9000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0x9 0x1 >;
status = "okay";
label = "I2C_1";
compatible = "nordic,nrf-twim";
sda-pin = < 0x1e >;
scl-pin = < 0x1f >;
ti_hdc: ti_hdc@41 {
compatible = "ti,hdc", "ti,hdc2022";
reg = < 0x41 >;
label = "HDC2022";
};
};
i2c2: i2c@b000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xb000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0xb 0x1 >;
status = "disabled";
label = "I2C_2";
};
i2c3: i2c@c000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xc000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0xc 0x1 >;
status = "disabled";
label = "I2C_3";
};
spi0: spi@8000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x8000 0x1000 >;
interrupts = < 0x8 0x1 >;
status = "disabled";
label = "SPI_0";
};
spi1: spi@9000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x9000 0x1000 >;
interrupts = < 0x9 0x1 >;
status = "disabled";
label = "SPI_1";
};
spi2: spi@b000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xb000 0x1000 >;
interrupts = < 0xb 0x1 >;
status = "disabled";
label = "SPI_2";
};
spi3: spi@c000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xc000 0x1000 >;
interrupts = < 0xc 0x1 >;
status = "disabled";
label = "SPI_3";
};
spi4: spi@a000 {
compatible = "nordic,nrf-spim";
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xa000 0x1000 >;
interrupts = < 0xa 0x1 >;
status = "disabled";
label = "SPI_4";
};
pwm0: pwm@21000 {
compatible = "nordic,nrf-pwm";
reg = < 0x21000 0x1000 >;
interrupts = < 0x21 0x1 >;
status = "okay";
label = "PWM_0";
#pwm-cells = < 0x1 >;
ch0-pin = < 0x1c >;
};
pwm1: pwm@22000 {
compatible = "nordic,nrf-pwm";
reg = < 0x22000 0x1000 >;
interrupts = < 0x22 0x1 >;
status = "disabled";
label = "PWM_1";
#pwm-cells = < 0x1 >;
};
pwm2: pwm@23000 {
compatible = "nordic,nrf-pwm";
reg = < 0x23000 0x1000 >;
interrupts = < 0x23 0x1 >;
status = "disabled";
label = "PWM_2";
#pwm-cells = < 0x1 >;
};
pwm3: pwm@24000 {
compatible = "nordic,nrf-pwm";
reg = < 0x24000 0x1000 >;
interrupts = < 0x24 0x1 >;
status = "disabled";
label = "PWM_3";
#pwm-cells = < 0x1 >;
};
gpio0: gpio@842500 {
compatible = "nordic,nrf-gpio";
gpio-controller;
reg = < 0x842500 0x300 >;
#gpio-cells = < 0x2 >;
label = "GPIO_0";
status = "okay";
port = < 0x0 >;
phandle = < 0x2 >;
};
gpio1: gpio@842800 {
compatible = "nordic,nrf-gpio";
gpio-controller;
reg = < 0x842800 0x300 >;
#gpio-cells = < 0x2 >;
ngpios = < 0x10 >;
label = "GPIO_1";
status = "okay";
port = < 0x1 >;
};
qspi: qspi@2b000 {
compatible = "nordic,nrf-qspi";
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x2b000 0x1000 >;
interrupts = < 0x2b 0x1 >;
status = "okay";
label = "QSPI";
sck-pin = < 0x11 >;
io-pins = < 0xd >, < 0xe >, < 0xf >, < 0x10 >;
csn-pins = < 0x12 >;
mx25r64: mx25r6435f@0 {
compatible = "nordic,qspi-nor";
reg = < 0x0 >;
writeoc = "pp4io";
readoc = "read4io";
sck-frequency = < 0x7a1200 >;
label = "MX25R64";
jedec-id = [ C2 28 17 ];
sfdp-bfp = [ E5 20 F1 FF FF FF FF 03 44 EB 08 6B 08 3B 04 BB EE FF FF FF FF FF 00 FF FF FF 00 FF 0C 20 0F 52 10 D8 00 FF 23 72 F5 00 82 ED 04 CC 44 83 68 44 30 B0 30 B0 F7 C4 D5 5C 00 BE 29 FF F0 D0 FF FF ];
size = < 0x4000000 >;
has-dpd;
t-enter-dpd = < 0x2710 >;
t-exit-dpd = < 0x88b8 >;
};
};
rtc0: rtc@14000 {
compatible = "nordic,nrf-rtc";
reg = < 0x14000 0x1000 >;
cc-num = < 0x4 >;
interrupts = < 0x14 0x1 >;
status = "okay";
clock-frequency = < 0x8000 >;
prescaler = < 0x1 >;
label = "RTC_0";
};
rtc1: rtc@15000 {
compatible = "nordic,nrf-rtc";
reg = < 0x15000 0x1000 >;
cc-num = < 0x4 >;
interrupts = < 0x15 0x1 >;
status = "okay";
clock-frequency = < 0x8000 >;
prescaler = < 0x1 >;
label = "RTC_1";
};
clock: clock@5000 {
compatible = "nordic,nrf-clock";
reg = < 0x5000 0x1000 >;
interrupts = < 0x5 0x1 >;
status = "okay";
label = "CLOCK";
};
power: power@5000 {
compatible = "nordic,nrf-power";
reg = < 0x5000 0x1000 >;
interrupts = < 0x5 0x1 >;
status = "okay";
};
wdt: wdt0: watchdog@18000 {
compatible = "nordic,nrf-watchdog";
reg = < 0x18000 0x1000 >;
interrupts = < 0x18 0x1 >;
status = "okay";
label = "WDT";
};
wdt1: watchdog@19000 {
compatible = "nordic,nrf-watchdog";
reg = < 0x19000 0x1000 >;
interrupts = < 0x19 0x1 >;
status = "disabled";
label = "WDT_1";
};
timer0: timer@f000 {
compatible = "nordic,nrf-timer";
status = "okay";
reg = < 0xf000 0x1000 >;
cc-num = < 0x6 >;
interrupts = < 0xf 0x1 >;
prescaler = < 0x0 >;
label = "TIMER_0";
};
timer1: timer@10000 {
compatible = "nordic,nrf-timer";
status = "okay";
reg = < 0x10000 0x1000 >;
cc-num = < 0x6 >;
interrupts = < 0x10 0x1 >;
prescaler = < 0x0 >;
label = "TIMER_1";
};
timer2: timer@11000 {
compatible = "nordic,nrf-timer";
status = "okay";
reg = < 0x11000 0x1000 >;
cc-num = < 0x6 >;
interrupts = < 0x11 0x1 >;
prescaler = < 0x0 >;
label = "TIMER_2";
};
usbd: usbd@36000 {
compatible = "nordic,nrf-usbd";
reg = < 0x36000 0x1000 >;
interrupts = < 0x36 0x1 >;
num-bidir-endpoints = < 0x1 >;
num-in-endpoints = < 0x7 >;
num-out-endpoints = < 0x7 >;
num-isoin-endpoints = < 0x1 >;
num-isoout-endpoints = < 0x1 >;
status = "okay";
label = "USBD";
};
};
gpiote: gpiote@4002f000 {
compatible = "nordic,nrf-gpiote";
reg = < 0x4002f000 0x1000 >;
interrupts = < 0x2f 0x5 >;
status = "okay";
label = "GPIOTE_1";
};
cryptocell_sw: cryptocell-sw {
compatible = "nordic,nrf-cc312-sw";
#address-cells = < 0x0 >;
label = "CRYPTOCELL_SW";
};
};
cpus {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
cpu@0 {
device_type = "cpu";
compatible = "arm,cortex-m33f";
reg = < 0x0 >;
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
mpu: mpu@e000ed90 {
compatible = "arm,armv8m-mpu";
reg = < 0xe000ed90 0x40 >;
arm,num-mpu-regions = < 0x8 >;
};
};
};
leds {
compatible = "gpio-leds";
led0: led_0 {
gpios = < &gpio0 0x1c 0x1 >;
label = "Green LED 0";
};
led1: led_1 {
gpios = < &gpio0 0x1d 0x1 >;
label = "Green LED 1";
};
led2: led_2 {
gpios = < &gpio0 0x1e 0x1 >;
label = "Green LED 2";
};
led3: led_3 {
gpios = < &gpio0 0x1f 0x1 >;
label = "Green LED 3";
};
};
buttons {
compatible = "gpio-keys";
button0: button_0 {
gpios = < &gpio0 0x17 0x11 >;
label = "Push button 1";
};
button1: button_1 {
gpios = < &gpio0 0x18 0x11 >;
label = "Push button 2";
};
button2: button_2 {
gpios = < &gpio0 0x8 0x11 >;
label = "Push button 3";
};
button3: button_3 {
gpios = < &gpio0 0x9 0x11 >;
label = "Push button 4";
};
};
reserved-memory {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
ranges;
sram0_image: image@20000000 {
reg = < 0x20000000 0x70000 >;
};
sram0_s: image_s@20000000 {
reg = < 0x20000000 0x40000 >;
};
sram0_ns: image_ns@20040000 {
reg = < 0x20040000 0x30000 >;
};
sram0_shared: memory@20070000 {
reg = < 0x20070000 0x10000 >;
};
};
};
Here is my pinout/wiring of my NRF5340DK and TI HDC2022 sensor:
SDA -> P0.30
SCL -> P0.31
VDD -> VDD
GND -> GND

