
Hi,
I am trying to run the NCS Zephyr ADXL372 sensor sample application (using nRF5340 DK) but get the following error:
Could not get ADXL372 device [00:00:00.000,518] [1B][1;31m<err> i2c_nrfx_twim: Error 195952641 occurred for message 0[1B][0m
This corresponds to the following NACK error:
NRFX_ERROR_DRV_TWI_ERR_ANACK = (NRFX_ERROR_DRIVERS_BASE_NUM + 1), ///< TWI error: Address not acknowledged.
I have stepped through debugging and see that it is unable to communicate with the ADXL372 using the NCS/Zephyr driver. Basically the ADXL372 driver fails its init/probe routine because it cannot read from the ADXL372. I cannot figure out why this is failing to read, I will attach my project files and zephyr.dts build files below. I have a feeling it is either an error in my overlay config or my wiring.
Project Files:
main.c :
/*
* Copyright (c) 2018 Analog Devices Inc.
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr.h>
#include <drivers/sensor.h>
#include <stdio.h>
#define pow2(x) ((x) * (x))
static double sqrt(double value)
{
int i;
double sqrt = value / 3;
if (value <= 0) {
return 0;
}
for (i = 0; i < 6; i++) {
sqrt = (sqrt + value / sqrt) / 2;
}
return sqrt;
}
K_SEM_DEFINE(sem, 0, 1);
static void trigger_handler(const struct device *dev,
struct sensor_trigger *trigger)
{
ARG_UNUSED(trigger);
if (sensor_sample_fetch(dev)) {
printf("sensor_sample_fetch failed\n");
return;
}
k_sem_give(&sem);
}
void main(void)
{
struct sensor_value accel[3];
double mag;
int i;
char meter[200];
const struct device *dev = device_get_binding(DT_LABEL(DT_INST(0, adi_adxl372)));
if (dev == NULL) {
printf("Could not get %s device\n", DT_LABEL(DT_INST(0, adi_adxl372)));
return;
}
struct sensor_trigger trig = {
.type = SENSOR_TRIG_DATA_READY,
.chan = SENSOR_CHAN_ACCEL_XYZ,
};
if (IS_ENABLED(CONFIG_ADXL372_PEAK_DETECT_MODE)) {
trig.type = SENSOR_TRIG_THRESHOLD;
}
if (IS_ENABLED(CONFIG_ADXL372_TRIGGER)) {
if (sensor_trigger_set(dev, &trig, trigger_handler)) {
printf("Could not set trigger\n");
return;
}
}
while (1) {
if (IS_ENABLED(CONFIG_ADXL372_TRIGGER)) {
if (IS_ENABLED(CONFIG_ADXL372_PEAK_DETECT_MODE)) {
printf("Waiting for a threshold event\n");
}
k_sem_take(&sem, K_FOREVER);
} else {
if (sensor_sample_fetch(dev)) {
printf("sensor_sample_fetch failed\n");
}
}
sensor_channel_get(dev, SENSOR_CHAN_ACCEL_XYZ, accel);
if (IS_ENABLED(CONFIG_ADXL372_PEAK_DETECT_MODE)) {
mag = sqrt(pow2(sensor_ms2_to_g(&accel[0])) +
pow2(sensor_ms2_to_g(&accel[1])) +
pow2(sensor_ms2_to_g(&accel[2])));
for (i = 0; i <= mag && i < (sizeof(meter) - 1); i++) {
meter[i] = '#';
}
meter[i] = '\0';
printf("%6.2f g: %s\n", mag, meter);
} else {
printf("AX=%10.2f AY=%10.2f AZ=%10.2f (m/s^2)\n",
sensor_value_to_double(&accel[0]),
sensor_value_to_double(&accel[1]),
sensor_value_to_double(&accel[2]));
}
if (!IS_ENABLED(CONFIG_ADXL372_TRIGGER)) {
k_sleep(K_MSEC(2000));
}
}
}
nrf5340dk_nrf5340_cpuappns.overlay :
/*
* Copyright (c) 2019 Linaro Limited
*
* SPDX-License-Identifier: Apache-2.0
*/
&i2c1 {
compatible = "nordic,nrf-twim";
status = "okay";
sda-pin = < 9 >;
scl-pin = < 10 >;
clock-frequency = <I2C_BITRATE_STANDARD>;
adi_adxl372: adxl372@53 {
compatible = "adi,adxl372";
reg = <0x53>;
label = "ADXL372";
int1-gpios = <&gpio0 11 0>;
};
};
/*&spi2 {
compatible = "nordic,nrf-spim";
status = "okay";
mosi-pin = <10>;
miso-pin = <7>;
sck-pin = <9>;
cs-gpios = <&gpio0 22 GPIO_ACTIVE_LOW>;
adxl372@0 {
compatible = "adi,adxl372";
reg = <0>;
spi-max-frequency = <8000000>;
label = "ADXL372";
int1-gpios = <&gpio0 11 GPIO_ACTIVE_HIGH>;
};
};*/
prj.conf :
CONFIG_STDOUT_CONSOLE=y CONFIG_LOG=y CONFIG_I2C=y #CONFIG_I2C_NRFX=y #not sure if this is needed, not part of the example config #CONFIG_SPI=y #use this instead of CONFIG_I2C=y for SPI CONFIG_SENSOR=y CONFIG_ADXL372=y CONFIG_ADXL372_I2C=y #CONFIG_ADXL372_SPI=y #use this instead of CONFIG_ADXL372_I2C=y for SPI CONFIG_SENSOR_LOG_LEVEL_WRN=y #CONFIG_CBPRINTF_FP_SUPPORT=y #use this when using SPI
CMakeLists.txt :
#
# Copyright (c) 2018 Analog Devices Inc.
#
# SPDX-License-Identifier: Apache-2.0
#
cmake_minimum_required(VERSION 3.13.1)
set(TEST_DTC_OVERLAY_FILE
${CMAKE_CURRENT_SOURCE_DIR}/nrf5340dk_nrf5340_cpuappns.overlay
)
set(PRJ_CONF_FILE
prj.conf
${CMAKE_CURRENT_LIST_DIR}/prj.conf
)
find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE})
project(adxl372)
zephyr_include_directories(include)
FILE(GLOB app_sources src/*.c)
target_sources(app PRIVATE ${app_sources})
build/zephyr/zephyr.dts :
/dts-v1/;
/ {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
model = "Nordic NRF5340 DK NRF5340 Application";
compatible = "nordic,nrf5340-dk-nrf5340-cpuapp";
chosen {
zephyr,flash-controller = &flash_controller;
zephyr,entropy = &cryptocell_sw;
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
zephyr,uart-mcumgr = &uart0;
zephyr,bt-mon-uart = &uart0;
zephyr,bt-c2h-uart = &uart0;
zephyr,ipc_shm = &sram0_shared;
zephyr,sram = &sram0_ns;
zephyr,flash = &flash0;
zephyr,code-partition = &slot0_ns_partition;
};
aliases {
led0 = &led0;
led1 = &led1;
led2 = &led2;
led3 = &led3;
sw0 = &button0;
sw1 = &button1;
sw2 = &button2;
sw3 = &button3;
};
soc {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
compatible = "nordic,nRF5340-CPUAPP-QKAA", "nordic,nRF5340-CPUAPP", "nordic,nRF53", "simple-bus";
interrupt-parent = < &nvic >;
ranges;
nvic: interrupt-controller@e000e100 {
compatible = "arm,v8m-nvic";
reg = < 0xe000e100 0xc00 >;
interrupt-controller;
#interrupt-cells = < 0x2 >;
arm,num-irq-priority-bits = < 0x3 >;
phandle = < 0x1 >;
};
systick: timer@e000e010 {
compatible = "arm,armv8m-systick";
reg = < 0xe000e010 0x10 >;
status = "disabled";
};
sram0: memory@20000000 {
compatible = "mmio-sram";
reg = < 0x20000000 0x80000 >;
};
sram1: memory@21000000 {
compatible = "mmio-sram";
reg = < 0x21000000 0x10000 >;
};
peripheral@40000000 {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
ranges = < 0x0 0x40000000 0x10000000 >;
flash_controller: flash-controller@39000 {
compatible = "nordic,nrf53-flash-controller";
reg = < 0x39000 0x1000 >;
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
label = "NRF_FLASH_DRV_NAME";
flash0: flash@0 {
compatible = "soc-nv-flash";
label = "NRF_FLASH";
erase-block-size = < 0x1000 >;
write-block-size = < 0x4 >;
reg = < 0x0 0x100000 >;
partitions {
compatible = "fixed-partitions";
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
boot_partition: partition@0 {
label = "mcuboot";
reg = < 0x0 0x10000 >;
};
slot0_partition: partition@10000 {
label = "image-0";
reg = < 0x10000 0x40000 >;
};
slot0_ns_partition: partition@50000 {
label = "image-0-nonsecure";
reg = < 0x50000 0x30000 >;
};
slot1_partition: partition@80000 {
label = "image-1";
reg = < 0x80000 0x40000 >;
};
slot1_ns_partition: partition@c0000 {
label = "image-1-nonsecure";
reg = < 0xc0000 0x30000 >;
};
scratch_partition: partition@f0000 {
label = "image-scratch";
reg = < 0xf0000 0xa000 >;
};
storage_partition: partition@fa000 {
label = "storage";
reg = < 0xfa000 0x6000 >;
};
};
};
};
adc: adc@e000 {
compatible = "nordic,nrf-saadc";
reg = < 0xe000 0x1000 >;
interrupts = < 0xe 0x1 >;
status = "okay";
label = "ADC_0";
#io-channel-cells = < 0x1 >;
};
dppic: dppic@17000 {
compatible = "nordic,nrf-dppic";
reg = < 0x17000 0x1000 >;
status = "okay";
label = "DPPIC";
};
egu0: egu@1b000 {
compatible = "nordic,nrf-egu";
reg = < 0x1b000 0x1000 >;
interrupts = < 0x1b 0x1 >;
status = "okay";
};
egu1: egu@1c000 {
compatible = "nordic,nrf-egu";
reg = < 0x1c000 0x1000 >;
interrupts = < 0x1c 0x1 >;
status = "okay";
};
egu2: egu@1d000 {
compatible = "nordic,nrf-egu";
reg = < 0x1d000 0x1000 >;
interrupts = < 0x1d 0x1 >;
status = "okay";
};
egu3: egu@1e000 {
compatible = "nordic,nrf-egu";
reg = < 0x1e000 0x1000 >;
interrupts = < 0x1e 0x1 >;
status = "okay";
};
egu4: egu@1f000 {
compatible = "nordic,nrf-egu";
reg = < 0x1f000 0x1000 >;
interrupts = < 0x1f 0x1 >;
status = "okay";
};
egu5: egu@20000 {
compatible = "nordic,nrf-egu";
reg = < 0x20000 0x1000 >;
interrupts = < 0x20 0x1 >;
status = "okay";
};
i2s0: i2s@28000 {
compatible = "nordic,nrf-i2s";
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x28000 0x1000 >;
interrupts = < 0x28 0x1 >;
status = "disabled";
label = "I2S_0";
};
ipc: ipc@2a000 {
compatible = "nordic,nrf-ipc";
reg = < 0x2a000 0x1000 >;
interrupts = < 0x2a 0x1 >;
status = "okay";
label = "IPC";
};
kmu: kmu@39000 {
compatible = "nordic,nrf-kmu";
reg = < 0x39000 0x1000 >;
interrupts = < 0x39 0x1 >;
status = "okay";
};
pdm0: pdm@26000 {
compatible = "nordic,nrf-pdm";
reg = < 0x26000 0x1000 >;
interrupts = < 0x26 0x1 >;
status = "disabled";
label = "PDM_0";
};
regulators: regulator@4000 {
compatible = "nordic,nrf-regulators";
reg = < 0x4000 0x1000 >;
status = "okay";
};
vmc: vmc@81000 {
compatible = "nordic,nrf-vmc";
reg = < 0x81000 0x1000 >;
status = "okay";
};
uart0: uart@8000 {
compatible = "nordic,nrf-uarte";
reg = < 0x8000 0x1000 >;
interrupts = < 0x8 0x1 >;
status = "okay";
label = "UART_0";
current-speed = < 0x1c200 >;
tx-pin = < 0x14 >;
rx-pin = < 0x16 >;
rts-pin = < 0x13 >;
cts-pin = < 0x15 >;
};
uart1: uart@9000 {
compatible = "nordic,nrf-uarte";
reg = < 0x9000 0x1000 >;
interrupts = < 0x9 0x1 >;
status = "disabled";
label = "UART_1";
};
uart2: uart@b000 {
compatible = "nordic,nrf-uarte";
reg = < 0xb000 0x1000 >;
interrupts = < 0xb 0x1 >;
status = "disabled";
label = "UART_2";
};
uart3: uart@c000 {
compatible = "nordic,nrf-uarte";
reg = < 0xc000 0x1000 >;
interrupts = < 0xc 0x1 >;
status = "disabled";
label = "UART_3";
};
i2c0: i2c@8000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x8000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0x8 0x1 >;
status = "disabled";
label = "I2C_0";
};
i2c1: i2c@9000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x9000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0x9 0x1 >;
status = "okay";
label = "I2C_1";
compatible = "nordic,nrf-twim";
sda-pin = < 0x9 >;
scl-pin = < 0xa >;
adi_adxl372: adxl372@53 {
compatible = "adi,adxl372";
reg = < 0x53 >;
label = "ADXL372";
int1-gpios = < &gpio0 0xb 0x0 >;
};
};
i2c2: i2c@b000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xb000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0xb 0x1 >;
status = "disabled";
label = "I2C_2";
};
i2c3: i2c@c000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xc000 0x1000 >;
clock-frequency = < 0x186a0 >;
interrupts = < 0xc 0x1 >;
status = "disabled";
label = "I2C_3";
};
spi0: spi@8000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x8000 0x1000 >;
interrupts = < 0x8 0x1 >;
status = "disabled";
label = "SPI_0";
};
spi1: spi@9000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x9000 0x1000 >;
interrupts = < 0x9 0x1 >;
status = "disabled";
label = "SPI_1";
};
spi2: spi@b000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xb000 0x1000 >;
interrupts = < 0xb 0x1 >;
status = "disabled";
label = "SPI_2";
};
spi3: spi@c000 {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xc000 0x1000 >;
interrupts = < 0xc 0x1 >;
status = "disabled";
label = "SPI_3";
};
spi4: spi@a000 {
compatible = "nordic,nrf-spim";
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0xa000 0x1000 >;
interrupts = < 0xa 0x1 >;
status = "disabled";
label = "SPI_4";
};
pwm0: pwm@21000 {
compatible = "nordic,nrf-pwm";
reg = < 0x21000 0x1000 >;
interrupts = < 0x21 0x1 >;
status = "okay";
label = "PWM_0";
#pwm-cells = < 0x1 >;
ch0-pin = < 0x1c >;
};
pwm1: pwm@22000 {
compatible = "nordic,nrf-pwm";
reg = < 0x22000 0x1000 >;
interrupts = < 0x22 0x1 >;
status = "disabled";
label = "PWM_1";
#pwm-cells = < 0x1 >;
};
pwm2: pwm@23000 {
compatible = "nordic,nrf-pwm";
reg = < 0x23000 0x1000 >;
interrupts = < 0x23 0x1 >;
status = "disabled";
label = "PWM_2";
#pwm-cells = < 0x1 >;
};
pwm3: pwm@24000 {
compatible = "nordic,nrf-pwm";
reg = < 0x24000 0x1000 >;
interrupts = < 0x24 0x1 >;
status = "disabled";
label = "PWM_3";
#pwm-cells = < 0x1 >;
};
gpio0: gpio@842500 {
compatible = "nordic,nrf-gpio";
gpio-controller;
reg = < 0x842500 0x300 >;
#gpio-cells = < 0x2 >;
label = "GPIO_0";
status = "okay";
port = < 0x0 >;
phandle = < 0x2 >;
};
gpio1: gpio@842800 {
compatible = "nordic,nrf-gpio";
gpio-controller;
reg = < 0x842800 0x300 >;
#gpio-cells = < 0x2 >;
ngpios = < 0x10 >;
label = "GPIO_1";
status = "okay";
port = < 0x1 >;
};
qspi: qspi@2b000 {
compatible = "nordic,nrf-qspi";
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
reg = < 0x2b000 0x1000 >;
interrupts = < 0x2b 0x1 >;
status = "okay";
label = "QSPI";
sck-pin = < 0x11 >;
io-pins = < 0xd >, < 0xe >, < 0xf >, < 0x10 >;
csn-pins = < 0x12 >;
mx25r64: mx25r6435f@0 {
compatible = "nordic,qspi-nor";
reg = < 0x0 >;
writeoc = "pp4io";
readoc = "read4io";
sck-frequency = < 0x7a1200 >;
label = "MX25R64";
jedec-id = [ C2 28 17 ];
sfdp-bfp = [ E5 20 F1 FF FF FF FF 03 44 EB 08 6B 08 3B 04 BB EE FF FF FF FF FF 00 FF FF FF 00 FF 0C 20 0F 52 10 D8 00 FF 23 72 F5 00 82 ED 04 CC 44 83 68 44 30 B0 30 B0 F7 C4 D5 5C 00 BE 29 FF F0 D0 FF FF ];
size = < 0x4000000 >;
has-dpd;
t-enter-dpd = < 0x2710 >;
t-exit-dpd = < 0x88b8 >;
};
};
rtc0: rtc@14000 {
compatible = "nordic,nrf-rtc";
reg = < 0x14000 0x1000 >;
cc-num = < 0x4 >;
interrupts = < 0x14 0x1 >;
status = "okay";
clock-frequency = < 0x8000 >;
prescaler = < 0x1 >;
label = "RTC_0";
};
rtc1: rtc@15000 {
compatible = "nordic,nrf-rtc";
reg = < 0x15000 0x1000 >;
cc-num = < 0x4 >;
interrupts = < 0x15 0x1 >;
status = "okay";
clock-frequency = < 0x8000 >;
prescaler = < 0x1 >;
label = "RTC_1";
};
clock: clock@5000 {
compatible = "nordic,nrf-clock";
reg = < 0x5000 0x1000 >;
interrupts = < 0x5 0x1 >;
status = "okay";
label = "CLOCK";
};
power: power@5000 {
compatible = "nordic,nrf-power";
reg = < 0x5000 0x1000 >;
interrupts = < 0x5 0x1 >;
status = "okay";
};
wdt: wdt0: watchdog@18000 {
compatible = "nordic,nrf-watchdog";
reg = < 0x18000 0x1000 >;
interrupts = < 0x18 0x1 >;
status = "okay";
label = "WDT";
};
wdt1: watchdog@19000 {
compatible = "nordic,nrf-watchdog";
reg = < 0x19000 0x1000 >;
interrupts = < 0x19 0x1 >;
status = "disabled";
label = "WDT_1";
};
timer0: timer@f000 {
compatible = "nordic,nrf-timer";
status = "okay";
reg = < 0xf000 0x1000 >;
cc-num = < 0x6 >;
interrupts = < 0xf 0x1 >;
prescaler = < 0x0 >;
label = "TIMER_0";
};
timer1: timer@10000 {
compatible = "nordic,nrf-timer";
status = "okay";
reg = < 0x10000 0x1000 >;
cc-num = < 0x6 >;
interrupts = < 0x10 0x1 >;
prescaler = < 0x0 >;
label = "TIMER_1";
};
timer2: timer@11000 {
compatible = "nordic,nrf-timer";
status = "okay";
reg = < 0x11000 0x1000 >;
cc-num = < 0x6 >;
interrupts = < 0x11 0x1 >;
prescaler = < 0x0 >;
label = "TIMER_2";
};
usbd: usbd@36000 {
compatible = "nordic,nrf-usbd";
reg = < 0x36000 0x1000 >;
interrupts = < 0x36 0x1 >;
num-bidir-endpoints = < 0x1 >;
num-in-endpoints = < 0x7 >;
num-out-endpoints = < 0x7 >;
num-isoin-endpoints = < 0x1 >;
num-isoout-endpoints = < 0x1 >;
status = "okay";
label = "USBD";
};
};
gpiote: gpiote@4002f000 {
compatible = "nordic,nrf-gpiote";
reg = < 0x4002f000 0x1000 >;
interrupts = < 0x2f 0x5 >;
status = "okay";
label = "GPIOTE_1";
};
cryptocell_sw: cryptocell-sw {
compatible = "nordic,nrf-cc312-sw";
#address-cells = < 0x0 >;
label = "CRYPTOCELL_SW";
};
};
cpus {
#address-cells = < 0x1 >;
#size-cells = < 0x0 >;
cpu@0 {
device_type = "cpu";
compatible = "arm,cortex-m33f";
reg = < 0x0 >;
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
mpu: mpu@e000ed90 {
compatible = "arm,armv8m-mpu";
reg = < 0xe000ed90 0x40 >;
arm,num-mpu-regions = < 0x8 >;
};
};
};
leds {
compatible = "gpio-leds";
led0: led_0 {
gpios = < &gpio0 0x1c 0x1 >;
label = "Green LED 0";
};
led1: led_1 {
gpios = < &gpio0 0x1d 0x1 >;
label = "Green LED 1";
};
led2: led_2 {
gpios = < &gpio0 0x1e 0x1 >;
label = "Green LED 2";
};
led3: led_3 {
gpios = < &gpio0 0x1f 0x1 >;
label = "Green LED 3";
};
};
buttons {
compatible = "gpio-keys";
button0: button_0 {
gpios = < &gpio0 0x17 0x11 >;
label = "Push button 1";
};
button1: button_1 {
gpios = < &gpio0 0x18 0x11 >;
label = "Push button 2";
};
button2: button_2 {
gpios = < &gpio0 0x8 0x11 >;
label = "Push button 3";
};
button3: button_3 {
gpios = < &gpio0 0x9 0x11 >;
label = "Push button 4";
};
};
reserved-memory {
#address-cells = < 0x1 >;
#size-cells = < 0x1 >;
ranges;
sram0_image: image@20000000 {
reg = < 0x20000000 0x70000 >;
};
sram0_s: image_s@20000000 {
reg = < 0x20000000 0x40000 >;
};
sram0_ns: image_ns@20040000 {
reg = < 0x20040000 0x30000 >;
};
sram0_shared: memory@20070000 {
reg = < 0x20070000 0x10000 >;
};
};
};
Hardware/test-bench setup:
So I am using the ADXL372Z (EVALUATION BOARD / MODEL) to be specific. From what I can tell there is no difference between this and the ADXL372 besides packaging.
This is the schematic/pinout provided for the ADXL372Z: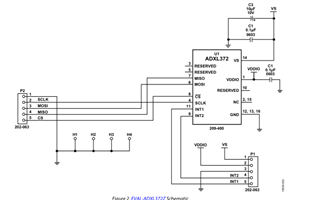
These are my notes on I2C wiring and how the ADXL372 is wired to my 5340dk (referencing above schematic):
ADXL Pin | Logic | 5340DK Pin P2 MOSI = SDA = P0.09 (4.7k Ohm pull-up to VDD) P2 CS = SCL = P0.10 (4.7k Ohm pull-up to VDD) P1 INT1 = INT = P0.11 P2 SCLK = GND = GND P2 MISO = GND = VDD (pulled low I2C address = 0x1D, pulled high I2C address = 0x53) P2 GND = GND = GND P1 GND = GND = GND P1 VS = VDD = VDD P1 VIO = VDD = VDD
Any help would be appreciated. I will add that I wasn't able to get it working using SPI the other day either but I don't really care about SPI so not too important.
