
Hello, guys. I'm using the PCA10040 and the SDK 16.0's BLE UART peripheral example. I am trying to make PWM signal below.
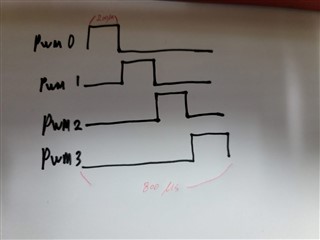
When PWM0 stops, PWM2 works, and when PWM2 stops, then PWM3, and in the same way, PWM4 works. And this signal is constantly repeated.
I tried to implement it only with the PWM SDK example, but I thought I needed other things to make it works, so I asked a question. please give me an advise.
Thank you for reding my issue.
