
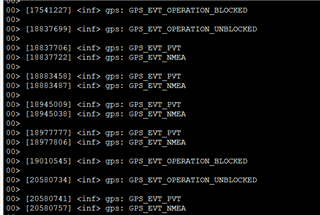
One of my projects needs to use NB and GPS functions at the same time. When testing, I found that even though NB network is not transmitting data, after I start GPS, I often receive messages that the operation is blocked. Why is that?
This is my code:
static void set_gps_enable(const bool enable)
{
u8_t tmpbuf[128] = {0};
if(enable == gps_control_is_enabled())
{
return;
}
if(enable)
{
at_cmd_write("AT+CFUN?", tmpbuf, sizeof(tmpbuf), NULL);
LOG_INF("modem status:%s", tmpbuf);
if(strcmp(tmpbuf, "+CFUN: 1") != 0)
{
if(at_cmd_write("AT+CFUN=1", NULL, 0, NULL) != 0)
{
LOG_INF("Can't turn on modem!");
EnterIdleScreen();
return;
}
}
LOG_INF("Starting GPS");
gps_control_start(K_NO_WAIT);
gps_is_on = true;
gps_start_time = k_uptime_get();
}
else
{
LOG_INF("Stopping GPS");
gps_control_stop(K_NO_WAIT);
gps_is_on = false;
gps_fix_time = 0;
gps_local_time = 0;
}
}
static void gps_handler(struct device *dev, struct gps_event *evt)
{
u8_t tmpbuf[128] = {0};
switch (evt->type)
{
case GPS_EVT_SEARCH_STARTED:
LOG_INF("GPS_EVT_SEARCH_STARTED\n");
gps_control_set_active(true);
break;
case GPS_EVT_SEARCH_STOPPED:
LOG_INF("GPS_EVT_SEARCH_STOPPED\n");
gps_control_set_active(false);
break;
case GPS_EVT_SEARCH_TIMEOUT:
LOG_INF("GPS_EVT_SEARCH_TIMEOUT\n");
gps_control_set_active(false);
break;
case GPS_EVT_PVT:
/* Don't spam logs */
LOG_INF("GPS_EVT_PVT");
if(test_gps_flag)
{
u8_t i,tracked;
u8_t strbuf[256] = {0};
memset(gps_test_info, 0x00, sizeof(gps_test_info));
for(i=0;i<GPS_PVT_MAX_SV_COUNT;i++)
{
u8_t buf[128] = {0};
if((evt->pvt.sv[i].sv > 0) && (evt->pvt.sv[i].sv < 32))
{
tracked++;
sprintf(buf, "%02d|%02d;", evt->pvt.sv[i].sv, evt->pvt.sv[i].cn0/10);
strcat(strbuf, buf);
}
}
sprintf(gps_test_info, "%d,", tracked);
strcat(gps_test_info, strbuf);
gps_test_update_flag = true;
//LOG_INF("%s\n",gps_test_info);
//UpdataTestGPSInfo();
//TestGPSShowInfor();
}
else
{
sprintf(tmpbuf, "Longitude:%f, Latitude:%f, Altitude:%f, Speed:%f, Heading:%f",
evt->pvt.longitude,
evt->pvt.latitude,
evt->pvt.altitude,
evt->pvt.speed,
evt->pvt.heading);
LOG_INF("%s",tmpbuf);
LOG_INF("Date: %02u-%02u-%02u", evt->pvt.datetime.year,
evt->pvt.datetime.month,
evt->pvt.datetime.day);
LOG_INF("Time (UTC): %02u:%02u:%02u\n", evt->pvt.datetime.hour,
evt->pvt.datetime.minute,
evt->pvt.datetime.seconds);
}
break;
case GPS_EVT_PVT_FIX:
LOG_INF("GPS_EVT_PVT_FIX");
if(test_gps_flag)
{
u8_t i,tracked;
u8_t strbuf[256] = {0};
memset(gps_test_info, 0x00, sizeof(gps_test_info));
for(i=0;i<GPS_PVT_MAX_SV_COUNT;i++)
{
u8_t buf[256] = {0};
if((evt->pvt.sv[i].sv > 0) && (evt->pvt.sv[i].sv < 32))
{
tracked++;
sprintf(buf, "%02d|%02d;", evt->pvt.sv[i].sv, evt->pvt.sv[i].cn0/10);
strcat(strbuf, buf);
}
}
sprintf(gps_test_info, "%d,", tracked);
strcat(gps_test_info, strbuf);
strcat(gps_test_info, "\n");
sprintf(strbuf, "Longitude:%f, Latitude:%f\n", evt->pvt.longitude, evt->pvt.latitude);
strcat(gps_test_info, strbuf);
sprintf(strbuf, "fix time:%d", gps_local_time/1000);
strcat(gps_test_info, strbuf);
gps_test_update_flag = true;
//LOG_INF("%s\n",gps_test_info);
//UpdataTestGPSInfo();
//TestGPSShowInfor();
}
else
{
sprintf(tmpbuf, "Longitude:%f, Latitude:%f", evt->pvt.longitude, evt->pvt.latitude);
LOG_INF("%s\n",tmpbuf);
memcpy(&gps_pvt_data, &(evt->pvt), sizeof(evt->pvt));
}
break;
case GPS_EVT_NMEA:
/* Don't spam logs */
LOG_INF("GPS_EVT_NMEA\n");
break;
case GPS_EVT_NMEA_FIX:
LOG_INF("GPS_EVT_NMEA_FIX");
if(gps_fix_time == 0)
{
gps_fix_time = k_uptime_get();
gps_local_time = gps_fix_time-gps_start_time;
}
if(!test_gps_flag)
{
LOG_INF("Position fix with NMEA data, fix time:%d", gps_local_time);
LOG_INF("NMEA:%s\n", evt->nmea.buf);
APP_Ask_GPS_off();
if(k_timer_remaining_get(&app_wait_gps_timer) > 0)
k_timer_stop(&app_wait_gps_timer);
k_timer_start(&app_send_gps_timer, K_MSEC(1000), NULL);
}
break;
case GPS_EVT_OPERATION_BLOCKED:
LOG_INF("GPS_EVT_OPERATION_BLOCKED\n");
break;
case GPS_EVT_OPERATION_UNBLOCKED:
LOG_INF("GPS_EVT_OPERATION_UNBLOCKED\n");
break;
case GPS_EVT_AGPS_DATA_NEEDED:
LOG_INF("GPS_EVT_AGPS_DATA_NEEDED\n");
k_work_submit_to_queue(app_work_q,
&send_agps_request_work);
break;
case GPS_EVT_ERROR:
LOG_INF("GPS_EVT_ERROR\n");
break;
default:
break;
}
}
void GPS_init(struct k_work_q *work_q)
{
app_work_q = work_q;
k_work_init(&send_agps_request_work, send_agps_request);
gps_control_init(app_work_q, gps_handler);
}
