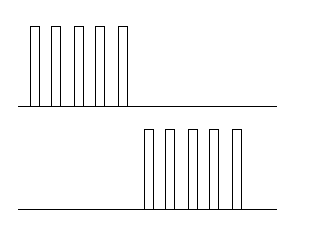
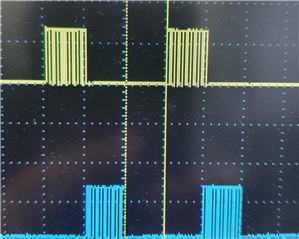
I want a waveform as below for motor control.
I am trying to create this using nrf pwm driver.
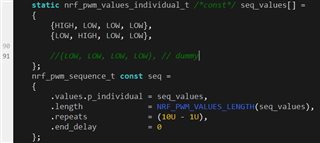
I set the pwm sequence as below and checked the output.
2nd duty repeat does not work.
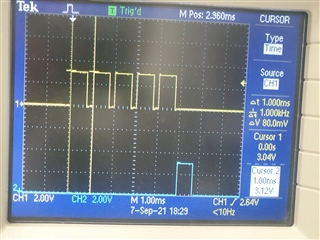
I added an unused 3rd dummy duty (line 91).
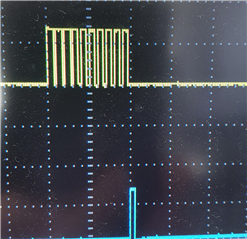
It seems to be working well.
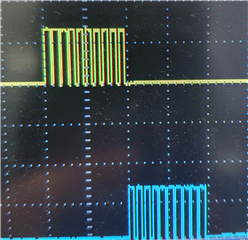
However, increasing the playback count to 2 introduces a delay between the outputs.
What should I do to get the waveform I want?
Give me advice .
Thanks.