
Hello , I am working on a project, Which which currently working fine , but my job is to add some feature to it. So it is a Mesh application i need some kind of custom sleep mode , so I need an RTC_Event that will be triggered after some time, I try to achieve this using Compare event . The build very well but when I try to debug and run. It jumps to Disassemble section and throws me an error. I am currently using RTC Instance 0, I don't know why this is happening, Also I am little new to this , Any help regarding this?.
Thanks
#define COMPARE_COUNTERTIME (5UL)
#define COMPARE_COUNTERTIME_1 (10UL) /**< Get Compare event COMPARE_TIME seconds after the counter starts from 0. */
extern volatile uint8_t onoffflage;
const nrf_drv_rtc_t rtc = NRF_DRV_RTC_INSTANCE(0); /**< Declaring an instance of nrf_drv_rtc for RTC0. */
/** @brief: Function for handling the RTC0 interrupts.
* Triggered on TICK and COMPARE0 match.
*/
void rtc_handler(nrf_drv_rtc_int_type_t int_type)
{
if (int_type == NRF_DRV_RTC_INT_COMPARE0)
{
nrf_drv_rtc_int_enable(&rtc, NRF_RTC_INT_COMPARE0_MASK);
onoffflage = 1;
}
if (int_type == NRF_DRV_RTC_INT_COMPARE1)
{
onoffflage = 0;
nrf_drv_rtc_counter_clear(&rtc);
nrf_drv_rtc_int_enable(&rtc, NRF_RTC_INT_COMPARE1_MASK);
}
}
This is my RTC Event Handler Function.
/** @brief Function initialization and configuration of RTC driver instance.
*/
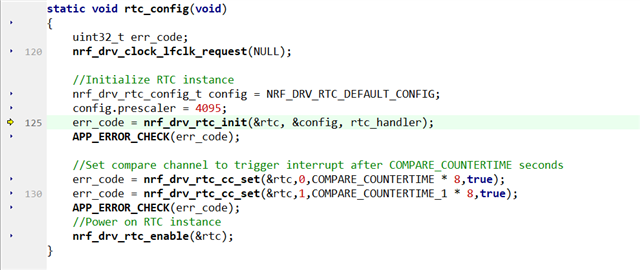
static void rtc_config(void)
{
uint32_t err_code;
nrf_drv_clock_lfclk_request(NULL);
//Initialize RTC instance
nrf_drv_rtc_config_t config = NRF_DRV_RTC_DEFAULT_CONFIG;
config.prescaler = 4095;
err_code = nrf_drv_rtc_init(&rtc, &config, rtc_handler);
APP_ERROR_CHECK(err_code);
//Set compare channel to trigger interrupt after COMPARE_COUNTERTIME seconds
err_code = nrf_drv_rtc_cc_set(&rtc,0,COMPARE_COUNTERTIME * 8,true);
err_code = nrf_drv_rtc_cc_set(&rtc,1,COMPARE_COUNTERTIME_1 * 8,true);
APP_ERROR_CHECK(err_code);
//Power on RTC instance
nrf_drv_rtc_enable(&rtc);
}
RTC Configuration function
Disassembly Section
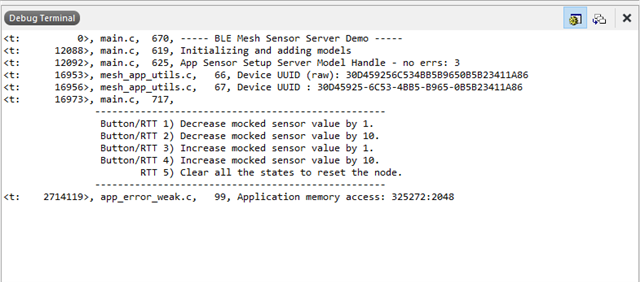
Traceback to Error
Thanks

