Hello Nordic Support,
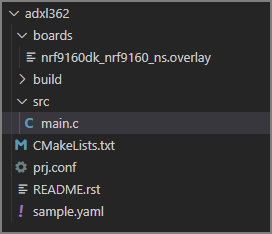
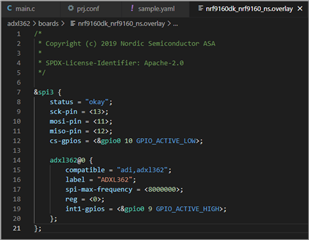
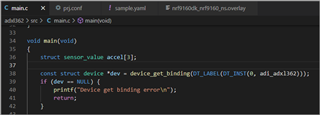
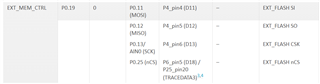
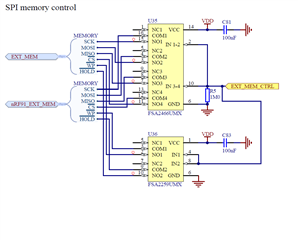
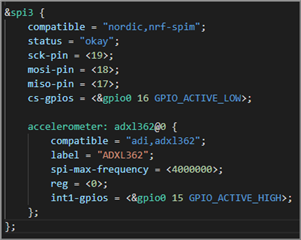
I started with a sensor sample project for ADXL362 Three Axis Accelerometer (https://github.com/zephyrproject-rtos/zephyr/tree/main/samples/sensor/adxl362) and connected to my nRF9160DK board. I used the same SPI lines that external memory is used on nRF9160DK board but a different Chip Select IO for the sensor. I am able to compile the code successfully but I am not able to bind the sensor. Can you please review and suggest what could be an issue?
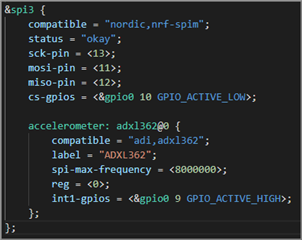
Project: