This is the next step of the process getting the canbus working with nrf9160 and the aditional MKR CAN shield from arduino
previus part can be read here
https://devzone.nordicsemi.com/f/nordic-q-a/81754/nrf9160dk_nrf9160-v0-9-0-v1-7-1-mcp2515-canbus-build-problems
As requested from the previus ticket i have checked the SPI bus and it seems to work.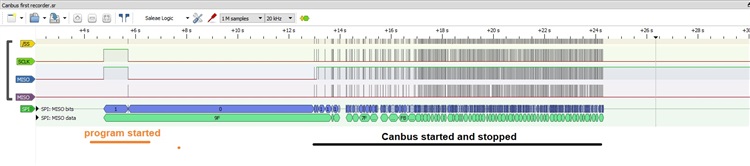
This is the text on the terminal:
[00:00:00.201,599] <dbg> mcp2515_can.socket_can_init: Init socket CAN device 0x2a698 (SOCKET_CAN_1) for dev 0x2a6c8 (CAN_1) [00:00:00.217,041] <dbg> net_core.net_init: (main): Priority 90 [00:00:00.225,646] <dbg> net_core.l3_init: (main): Network L3 init done [00:00:00.234,954] <dbg> mcp2515_can.socket_can_iface_init: Init CAN interface 0x20014a08 dev 0x2a698 uart:~$ *** Booting Zephyr OS build v2.7.0-ncs1 *** [00:00:00.251,403] <inf> net_socket_can_sample: sleeping for 5 seconds [00:00:05.260,772] <dbg> net_ctx.net_context_bind: (main): Context 0x200154d8 binding to 1 iface[2] 0x20014a08 [00:00:05.273,559] <dbg> net_conn.conn_register_debug: (main): [0x20015974/1/4/0x05] remote -/0 [00:00:05.285,064] <dbg> net_conn.conn_register_debug: (main): local ?/0 cb 0x17931 ud (nil) [00:00:05.296,417] <dbg> net_sock_can.can_register_filters: (main): Registering 1 filters [00:00:05.307,281] <dbg> net_sock_can.can_register_receiver: (main): Max 1 receivers [00:00:05.317,840] <dbg> net_socket_can_sample.setup_socket: Started socket CAN TX thread [00:00:05.328,704] <inf> net_socket_can_sample: 1st RX fd 0 [00:00:05.336,975] <inf> net_socket_can_sample: caaling rx command [00:00:05.345,855] <dbg> net_socket_can_sample.rx: [0] Waiting CAN data... [00:00:06.317,871] <dbg> net_socket_can_sample.tx: Sending CAN data...
