The board is nRF5340 DK.
nRF Connect SDK1.8.0 / Windows
Example Peripheral UART.
I want to DECLARE them, not change them with different types of functions. There are examples for the second. I want to compile the project directly with these values. I know that then the individual devices will be understood each other, for the specific values. Everywhere in the examples are used functions that change in the process of work, I do not want that. I don't care how this happens in the different SoftDevices.
I want to change the default ones.
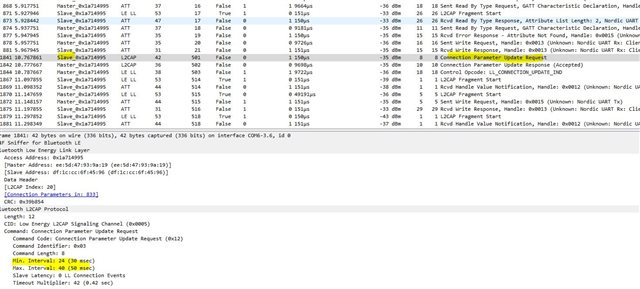
BT_LE_CONN_PARAM_DEFAULT
Default LE connection parameters: Connection Interval: 30-50 ms Latency: 0 Timeout: 4 s
Enable LE Data Packet Length Extension.
How and where to declare them?