
Hi,
I'm trying to use examples.
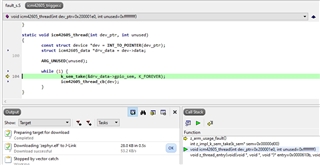
The ICM42605 example does not work.
I get the following errors.
[00:00:00.257,354] <err> os: ***** MPU FAULT *****
[00:00:00.257,446] <err> os: Data Access Violation
[00:00:00.257,446] <err> os: MMFAR Address: 0xd28
[00:00:00.257,476] <err> os: r0/a1: 0x2000190c r1/a2: 0x00000d20 r2/a3: 0xf01369f7
[00:00:00.257,507] <err> os: r3/a4: 0x00000d20 r12/ip: 0x00000000 r14/lr: 0x00012b39
[00:00:00.257,507] <err> os: xpsr: 0xa1000000
[00:00:00.257,537] <err> os: Faulting instruction address (r15/pc): 0x00012b56
[00:00:00.257,537] <err> os: >>> ZEPHYR FATAL ERROR 0: CPU exception on CPU 0
[00:00:00.257,568] <err> os: Current thread: 0x20000ee0 (unknown)
[00:00:01.295,135] <err> os: Halting system
There seems to be an error in the code below.
It was tested with nRF52832.
Thanks in advance.

