Hello,
We are trying to get UART communication between nRF9160 and MSP430.
MSP430 need to send out a sensor data through UART.
We are using 1.9.1 SDK, and Visual Studio as IDE.
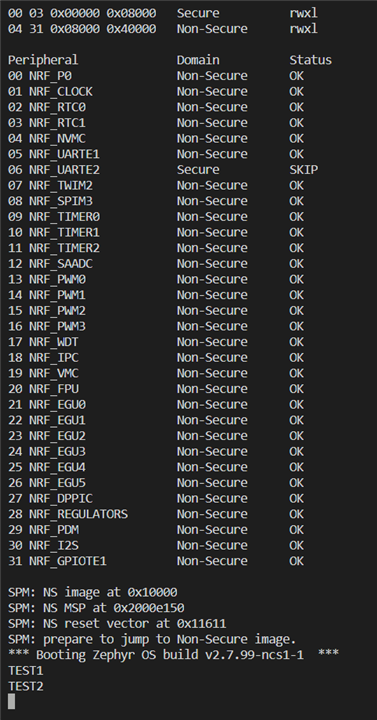
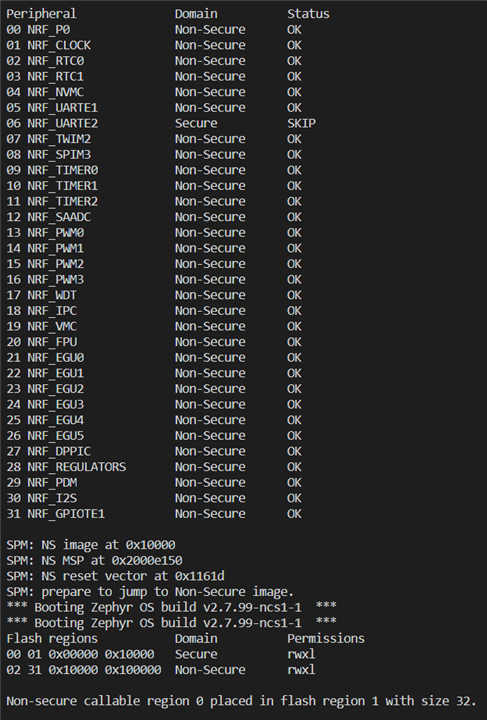
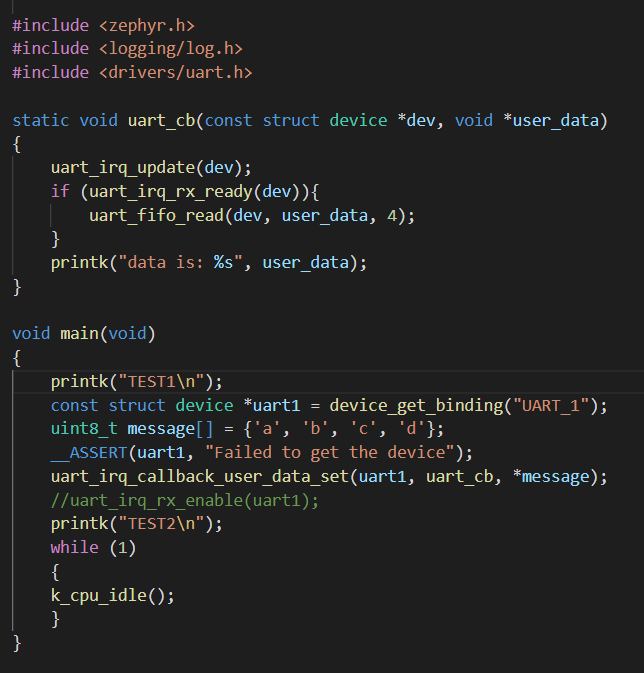
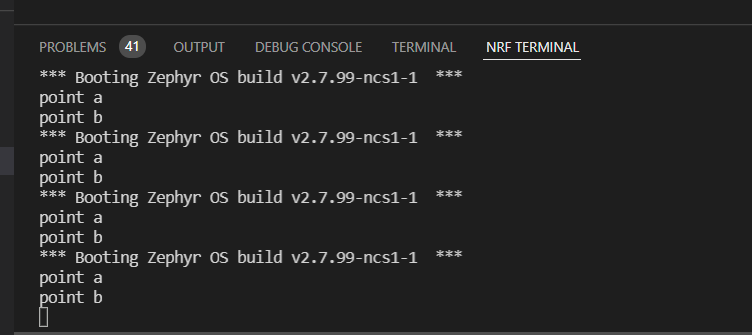
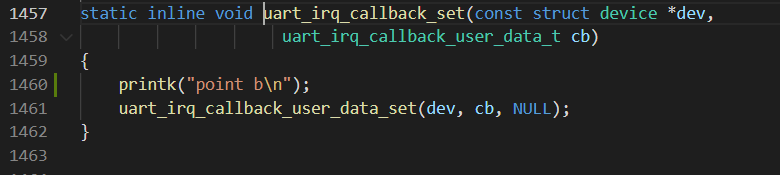
The code gets caught up on "uart_irq_callback_set", and reboots the device right after that line.
Overlay file:
/ {
chosen {
zephyr,bt-uart=&uart1;
};
};
&uart1 {
compatible = "nordic,nrf-uarte";
current-speed = <115200>;
status = "okay";
tx-pin = <00>;
rx-pin = <01>;
rts-pin = <0xFFFFFFFF>;
cts-pin = <0xFFFFFFFF>;
};
Configuration:
CONFIG_SERIAL=y
CONFIG_TRUSTED_EXECUTION_NONSECURE=y
CONFIG_UART_INTERRUPT_DRIVEN=y
CONFIG_BSD_LIBRARY_TRACE_ENABLED=n
CONFIG_MAIN_STACK_SIZE=4096
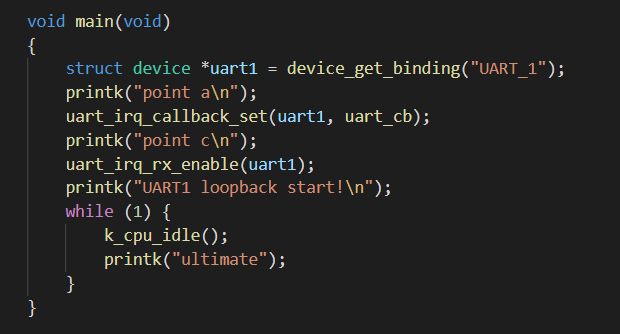
Point b is an entrance into callback. What could be potential reasons/ways to debug?