
Hello, I am trying to communicate with a Bosch BMI 270 device(datasheet) using the nrf5340dk. I originally tried to use I2C since there was an example file available for this but I didn't manage to get it working and I'm supposed to use SPI anyways. I macgyvered something together from the bmi270 file in the zephyr/sensor folder and an example I found for SPI communication with the nrf5340dk.
Overlay file:
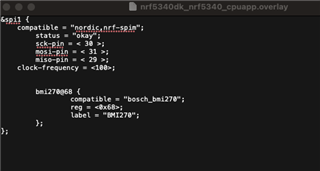
For I2C you're supposed to use the 0x68 register but I couldn't find one for SPI in the datasheet so I just used the same(probably wrong)
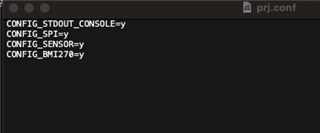
Project config:
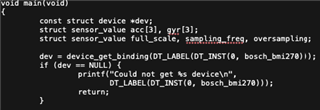
Where it gets stuck in main.c(device_get_binding returns NULL, same with I2C):
To configure the BMI270 into SPI you were supposed to have a rising edge on CSB after startup so I used a button.
I am completely new to the nrf5340 and nordic products. My only previous experience is with Arduino and mbed so this feels like a pretty big jump in terms of complexity. I use macOS and v1.9.1 nrf sdk.
