Hi Nordic :)
I followed last week the nice Webinar on topics : Nordic Distance Measurement library
I'm using two nrf52833 DK, and run on both nrf_dm sample zephyr project.
I have to admit that i was really enthousiast by the results of the high precision method.
But i have to admit that by running the example i can't achieve same result than you.
Both stability and precision in direct path indoor environnement are not really what i expect.
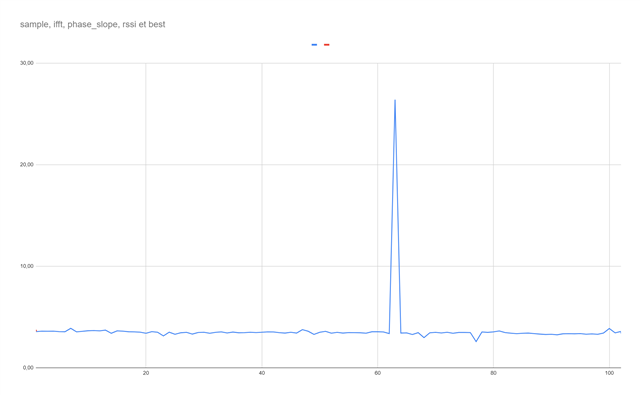
By waiting that i develop a small tool to log my results and share with you real data,
1) is there an option in the example code nrf_dm that i could change to put at maximum the precision even if it cost time ans flash size.
I only found in peer.c: #define DEFAULT_RANGING_MODE DM_RANGING_MODE_MCPD that should be better than RTT on short range.
2) Durring webinar you talked about nrf_dm_high_precision_calc that i couldn't find in the code, only in API documentation. Is it possible to quickly adapt nrf_dm demo to use it ?