Hello everyone,
I am working with the SDK v17.1.0 with the DK nRF52832. I want te retrieve data from a battery cell monitor which uses the LTC6804 from Analog Device.
I am communicating with it through SPI and sending it the trams of commands necessay to read the voltage of the cells. Through a logic Analyser, I see that I am sending the correct frames on the MOSI bus, the clock is working fine and the Channel Select aswell.
The only thing that is always empty is the MISO bus which means that I can't retrieve the data from the LTC6804. I have tried everything that was described in the devzone (Correct Pins, changing SPI mode, pull-up resistors, changing the size of my rx buffer) but nothing worked.
Do you have any ideas?
Thank you!
The frames I am sending to read the voltage:
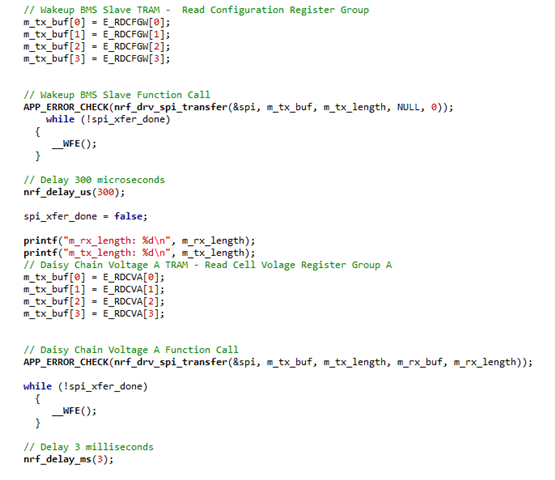
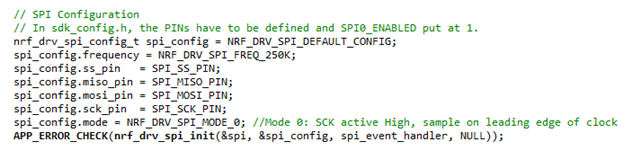
My SPI configuration
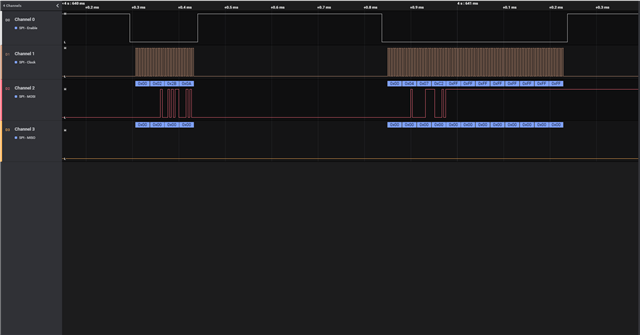
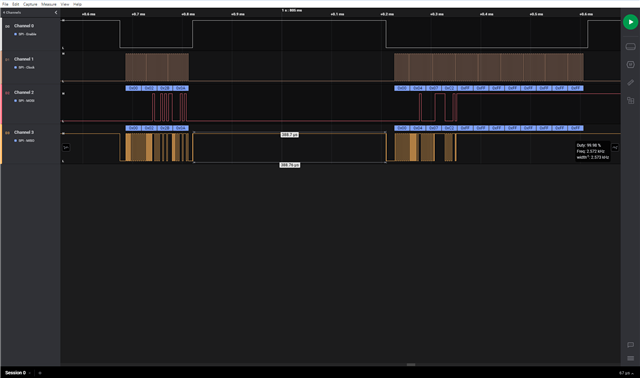
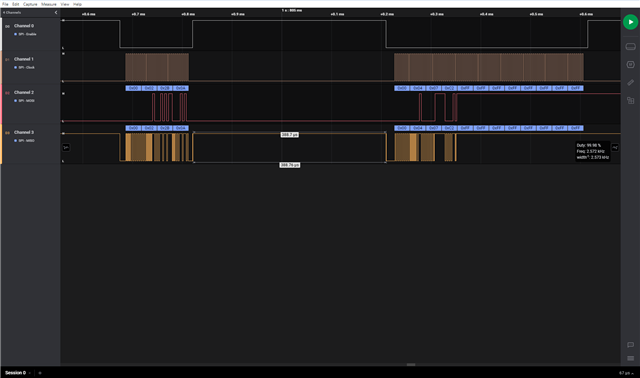
The logic analyser results: