I am trying to use the MCP2515 SPI2CAN adapter with the nRF9160 DK.
I started by trying to get the Zephyr socket_can sample to work. My efforts are based on this thread.
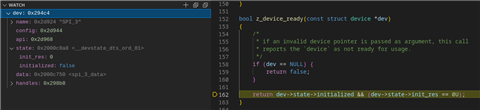
The problem is, that I am always getting an "SPI bus not ready" error from the can_mcp2515 driver.
I successfully tested the SPI with a simple loopback example, so the overlay should be correct.
Here is my device tree overlay:
&spi3 {
status = "okay";
cs-gpios = <&gpio0 13 GPIO_ACTIVE_LOW>;
sck-pin = <10>;
mosi-pin = <11>;
miso-pin = <12>;
can1: mcp2515@0 {
compatible = "microchip,mcp2515";
spi-max-frequency = <1000000>;
int-gpios = <&gpio0 31 GPIO_ACTIVE_LOW>;
status = "okay";
label = "CAN_1";
reg = <0x0>;
osc-freq = <10000000>;
bus-speed = <1000000>;
sjw = <1>;
prop-seg = <2>;
phase-seg1 = <7>;
phase-seg2 = <6>;
#address-cells = <1>;
#size-cells = <0>;
};
};
/ {
chosen {
zephyr,canbus = &can1;
};
};
prj.conf:
CONFIG_CAN=y CONFIG_SPI=y CONFIG_SPI_NRFX=y CONFIG_CAN_MAX_FILTER=5 CONFIG_CAN_MCP2515=y CONFIG_SPI_LOG_LEVEL_DBG=y CONFIG_NETWORKING=y CONFIG_NET_SOCKETS=y CONFIG_NET_SOCKETS_CAN=y CONFIG_NET_SOCKETS_POSIX_NAMES=y CONFIG_NET_IPV6=n CONFIG_NET_IPV4=n CONFIG_NET_MGMT=n CONFIG_NET_TCP=n CONFIG_NET_UDP=n CONFIG_NET_DEFAULT_IF_CANBUS_RAW=y CONFIG_NET_PKT_RX_COUNT=30 CONFIG_NET_PKT_TX_COUNT=30 CONFIG_NET_BUF_RX_COUNT=30 CONFIG_NET_BUF_TX_COUNT=30 CONFIG_TEST_RANDOM_GENERATOR=n CONFIG_NET_SHELL=y CONFIG_LOG=y CONFIG_NET_LOG=y CONFIG_LOG_MODE_IMMEDIATE=y CONFIG_NET_SOCKETS_LOG_LEVEL_DBG=y CONFIG_CAN_LOG_LEVEL_DBG=y #CONFIG_NET_CONTEXT_LOG_LEVEL_DBG=y #CONFIG_NET_CORE_LOG_LEVEL_DBG=y #CONFIG_NET_CONN_LOG_LEVEL_DBG=y # Use smaller buffers for net_buf as CANBUS packets are quite small. CONFIG_NET_BUF_DATA_SIZE=64
Output: