
Hello,
We're working with nRF52833 & nRF52840 and I'm trying to figure out why we've ~0.3ms IRQ Latency from the moment I call the function "uart_irq_tx_enable(dev);" until I actually get to the callback I've registered at "uart_irq_callback_set".
To be honest, I see no reason for this latency to not be close to zero.

Here a diagram that tries to explain our benchmark timeline. I'm trying to understand from where the red bar (IRQ Latency) comes and how to reduce it.
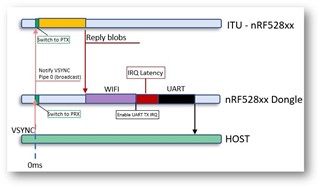
Note: communication between "HOST" and "nRF528xx Dongle" is via USB, "nRF528xx Dongle" and ""ITU nRF528xx" is wifi (ESB).
Thanks in advance!

