Hello Nordic,
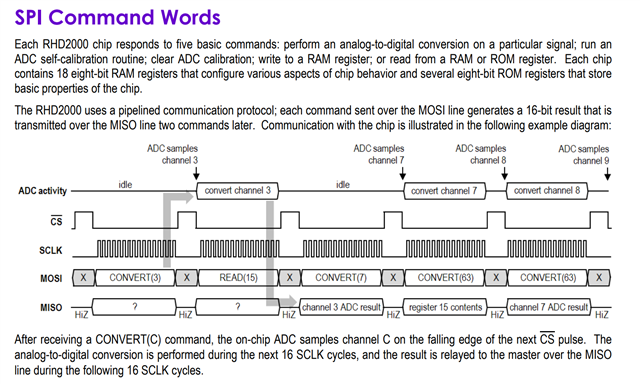
I am using nRF 52840 (SPI Master) with RHD2216(SPI Slave) to get sample data through SPI.
I have used the nRF connect SDK v1.9.0 SPI example to build my application as a reference.
This application is working fine, but when the timer period is set to 1 MSEC, the main loop will be blocked, and the main problem I think is the low operating speed of the spi_transieve function.
As a reference, when using spi_transieve API to send a data array in one spi_transieve calling, the speed is same as the spi_config setting. However, using the round-robin fashion to send the same size data with many spi_transieve calling, the speed is going to slow down, and the gap is huge, like ten times.
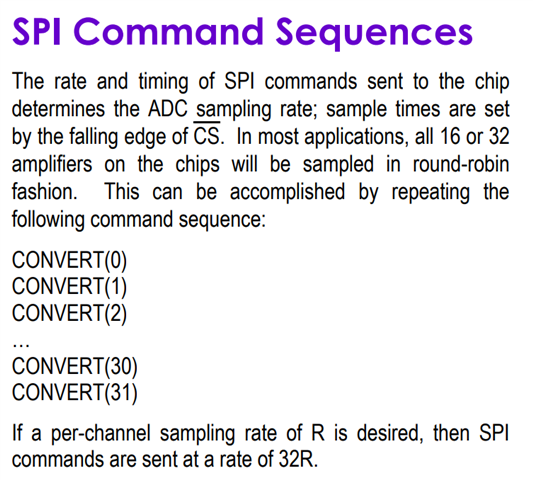
But using the round-robin fashion is the recommended way by Intan to configure the RHD2216 chip.
Please let me know if this spi_transieve API can be faster in the round-robin fashion to meet the Intan chips' demand.
I have attached my code along with a link of the data sheet for Intan RHD2216.
/*
* Copyright (c) 2012-2014 Wind River Systems, Inc.
*
* SPDX-License-Identifier: Apache-2.0
*/
/*
* include
*/
#include <zephyr.h>
#include <sys/printk.h>
#include <drivers/spi.h>
#include <drivers/gpio.h>
#include <device.h>
#include <devicetree.h>
#include <kernel.h>
typedef unsigned char u8_t;
typedef unsigned short u16_t;
/*
* marco define and struct define
*/
// marco define
#define SLEEP_TIME_MS 2000
#define BLE_BUFFER_SIZE 190 // 10 sample 1 BLE packet
static u16_t T_result[19];
// RHD command
// CONVERT command LSB set to 0(option)TODO
static u16_t RHD_CONVERT[19] = {0x0000 ,0x0100 ,0x0200 ,0x0300 ,0x0400 ,0x0500 ,0x0600 ,0x0700 ,
0x0800 ,0x0900 ,0x0a00 ,0x0b00 ,0x0c00 ,0x0d00 ,0x0e00 ,0x0f00 ,0xFF00 ,0xFF00 ,0xFF00};
// 16 channels + 3 dummy command(read ROM 63)(user define)
// 0x3f00 -> CONVERT(63)
// ADC self-calibration command ,this command needs nine dummy command to generate the necessary clock cycles to run.
#define CALIBRATE 0x5500
static const u16_t NINE_DUMMPY[9] = {0xbf00 ,0xbf00 ,0xbf00 ,0xbf00 ,0xbf00 ,0xbf00 ,0xbf00 ,0xbf00 ,0xbf00};
#define CLEAR 0x6A00 // not necessary to use this command
// Registers configuration using write command
#define Register0 0x80DE// amp fast settle is 0 ,20-150HZ filter ,enable ADC AND amp(disable is OK)
#define Register1 0x8120 // VDD sense disable ,using 16 * 1KS/s ADC
#define Register2 0x8228 // MUX bias current, configuration as above
#define Register3 0x8302 //diable tempS and digout
#define Register4 0x84B0 // absmode enable + unsigned ADC + weak MISO + DSP high-pass filter enable(differentiator)
// Impedance check
#define Register5 0x8500 // Impedance check control ,which is disable
#define Register6 0x8600 // DAC output voltage ,there is 0
#define Register7 0x8700 // Impedance check electrode select, this is 0
// on-chip Amplifier bandwidth Select
#define Register8 0x882C // using 20-150 Hz bandwidth
#define Register9 0x8911
#define Register10 0x8a08
#define Register11 0x8b15
#define Register12 0x8c36
#define Register13 0x8d00
// indicidual Amplifier Power ,all set to one for using all channels' Amplifier
#define Register14 0x8eff
#define Register15 0x8fff
#define Register16 0x90ff
#define Register17 0x91ff
// BLE buffer database
// there is a test BLE buffer
static u16_t BLE_buffer[BLE_BUFFER_SIZE];
static int BLE_buffer_inds = 0;
// spi struct
static u16_t tx_buffer[1];
static u16_t rx_buffer[1];
const struct spi_buf tx_buf = {
.buf = tx_buffer,
.len = sizeof(tx_buffer)
};
const struct spi_buf_set tx = {
.buffers = &tx_buf,
.count = 1
};
struct spi_buf rx_buf = {
.buf = rx_buffer,
.len = sizeof(rx_buffer),
};
const struct spi_buf_set rx = {
.buffers = &rx_buf,
.count = 1
};
// LED
/* The devicetree node identifier for the "led0" alias. */
#define LED0_NODE DT_ALIAS(led0) // macro function of devicetree
#if DT_NODE_HAS_STATUS(LED0_NODE, okay)
#define LED0 DT_GPIO_LABEL(LED0_NODE, gpios)
#define PIN DT_GPIO_PIN(LED0_NODE, gpios)
#define FLAGS DT_GPIO_FLAGS(LED0_NODE, gpios)
#else
/* A build error here means your board isn't set up to blink an LED. */
//#error "Unsupported board: led0 devicetree alias is not defined"
#define LED0 ""
#define PIN 0
#define FLAGS 0
#endif
// SPI RHD cs
#if DT_SPI_HAS_CS_GPIOS(DT_NODELABEL(spi1))
#define RHD2216 DT_SPI_DEV_CS_GPIOS_LABEL(DT_NODELABEL(a)) // get CS label a is RHD2216
#define RHD_PIN DT_SPI_DEV_CS_GPIOS_PIN(DT_NODELABEL(a)) // get RHD cs pin
#define RHD_FLAGS DT_SPI_DEV_CS_GPIOS_FLAGS(DT_NODELABEL(a)) // get RHD FLAGS
#else
#define RHD2216 ""
#define RHD_PIN 0
#define RHD_FLAGS 0
#endif
// timer
struct k_timer RHD_timer;
extern void my_timer_handler(struct k_timer *timer_id); // cb function call
// SPI
struct device * spi_dev;
static struct spi_cs_control spi_cs;
struct device * RHD_dev; // Define a pointer to the device structure
// spi config
static const struct spi_config spi_cfg = {
.operation = SPI_WORD_SET(8) | SPI_TRANSFER_MSB |
SPI_MODE_CPOL | SPI_MODE_CPHA ,
.frequency = 16000000 ,
// .slave = 0,
};
// RHD_CS
// const struct device *RHD_dev; // Define a pointer to the device structure
bool RHD_SAMPLE = true;
int ret;
int RHD_err;
// LED Blinky
const struct device *LED_dev;
bool led_is_on = true;
int ret_LED;
static struct k_poll_signal cs_signal;
/*
* function define
*/
// timer function
// SPI
static void spi_init(void)
{
const char* const spiName = "SPI_1"; //SPI1 label
spi_dev = device_get_binding(spiName);
cs_signal.signaled = 0;
if (spi_dev == NULL) {
printk("Could not get %s device\n", spiName);
return;
}
}
u16_t spi_trans(u16_t command) // SPI trans in the timer period
{
int err;
tx_buffer[0] = command;
err = spi_transceive(spi_dev, &spi_cfg, &tx, &rx);
RHD_SAMPLE = !RHD_SAMPLE;
if (err) {
printk("SPI error: %d\n", err);
return -1;
} else {
return rx_buffer[0];
}
}
// RHD init function
static int RHD2216_init(void){
static const u16_t Register_config[18] = {Register0 ,Register1 ,Register2 ,Register3 ,Register4 ,Register5 ,Register6 ,Register7 ,
Register8 ,Register9 ,Register10 ,Register11 ,Register12 ,Register13 ,Register14 ,Register15 ,
Register16 ,Register17};
static u16_t result[18];
int err;
u16_t calibrate_err;
for(int i=0 ;i <sizeof(Register_config) / 2;i++){
result[i] = spi_trans(Register_config[i]);
}
k_sleep(K_USEC(100)); // 100us delay before ADC calibrate
calibrate_err = spi_trans(CALIBRATE);
for(int j=0 ;j<9;j++){ // using generate nine SCLK to calibrate ADC
calibrate_err = spi_trans(NINE_DUMMPY[j]);
}
if(calibrate_err == 0xbf00){ // only check last calibrate result this is a loopback test ,true value is 0x8000 TODO
printk("calibrate success! \n");
}else{
err = 1;
return err;
}
// loopback test ,to test the correct result (write command result) TODO
for(int j=0 ;j <sizeof(Register_config) / 2;j++){
if(result[j] == Register_config[j]){
err = 0;
}else{
err = 1;
return err;
}
}
return err;
}
/*
* cb function define
*/
// timer cb
void RHD_handler(struct k_work *work) // using round-robin fashion ,a timer callback to sample all needed channels
{
// static u16_t T_result[19];
uint64_t stamp;
int64_t delta;
stamp = k_uptime_get_32();
/* do the processing that needs to be done periodically */
for(int j = 0;j<10;j++){
for(int i = 0; i<19;i++){
T_result[i] = spi_trans(RHD_CONVERT[i]);
}}
delta = k_uptime_delta(&stamp);
printk("SPI Use time is:%lld ms \n", delta);
}
K_WORK_DEFINE(my_work, RHD_handler); // define RHD_handler as my_work
void my_timer_handler(struct k_timer *dummy)
{
k_work_submit(&my_work);
}
/*
* main function loop
*/
void main(void)
{
/*
* setup
*/
// timer
k_timer_init(&RHD_timer, my_timer_handler, NULL); // init timer
// blinky LED setup
// Extract the device driver implementation
LED_dev = device_get_binding(LED0); // combine the driver and devicetree node
if (LED_dev == NULL) {
return;
}
// Configure the GPIO pin
ret_LED = gpio_pin_configure(LED_dev, PIN, GPIO_OUTPUT_ACTIVE | FLAGS);
if (ret_LED < 0) {
return;
}
// SPI
printk("SPIM Example\n");
spi_init();
printk( "RHD_FLAGS %x\n",RHD_FLAGS);
RHD_err = RHD2216_init();
if(RHD_err){
printk("RHD2216 init fail \n");
}else{
RHD_err = spi_trans(RHD_CONVERT[0]);
/* start periodic timer that expires once at 1kHz */
k_timer_start(&RHD_timer, K_SECONDS(3), K_USEC(5000)); // first param is timer duration(initial timer duration)
}
/*
* Loop function : other data process code
*/
while(true){
printk("This is main loop! \n");
if(BLE_buffer_inds == BLE_BUFFER_SIZE){
// start BLE trans TODO
printk("BLE trans start! \n");
BLE_buffer_inds = 0;
}
}
}
http://intantech.com/files/Intan_RHD2000_series_datasheet.pdf