I have acquired a basic 3x3 matrix scanning type button board that drops onto the Shield interface of the nRF5340. I am running the "peripheral_hids_keyboard" sample project with Zephyr. The button board is the "Ibridge lite 3×3 keypad shield" from https://www.electrokit.com/en/product/ibridge-lite-3x3-keypad-shield-with-lcd-interface/.
What would be the recommend way to add a scanning keyboard driver to this sample project? I am just getting familiar with this environment and would like to avoid wasting time by re-inventing the wheel if i can avoid it.
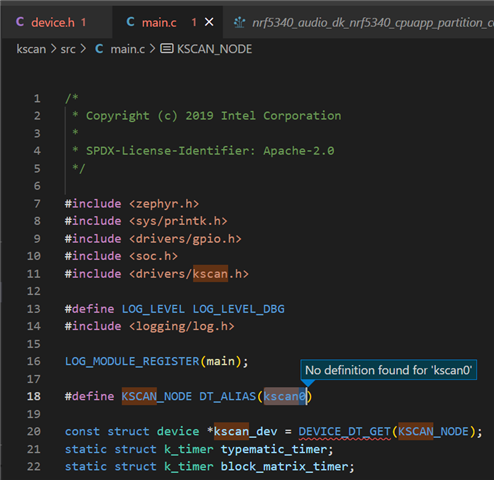
I did enable the CONFIG_KSCAN option in the .config file but I don't know how to go any further at this moment.
Thanks!