Hello
I am trying to change the code from the HAL code up to NRFX in order to make it event-based instead of using infinite while loops.
I am using 52840 on a custom PCA with goal in mind to create a half-duplex-half-UART communication.
Working with HAL drivers, the code works as intended, but it is not optimized and is very power hungry for our needs.
The HAL Setup and sending of the message (Byte by byte, each byte 10 bits at a time (Start - 8xData - Stop)):
TxSetup()
{
NRF_P0->DIRSET = ((1UL) << PIN_NEG); // PIN_NEG as output
NRF_P0->OUTCLR = ((1UL) << PIN_NEG); // initial LOW on PIN_NEG
NRF_P0->DIRSET = ((1UL) << PIN_POS); // PIN_POS as output
NRF_P0->OUTSET = ((1UL) << PIN_POS); // initial HIGH on PIN_POS
CounterTopRegister = F_CLK / F_PWM; // F_CLK = 16000000
cyclesPerBit = F_PWM / LL_BAUDRATE; // F_PWM = 32400 ; LL_BAUDRATE = 1200
P_PWM_HIGH = CounterTopRegister;
P_PWM_LOW = (int)(0.5 * CounterTopRegister);
N_PWM_HIGH = P_PWM_HIGH + 0x8000;
N_PWM_LOW = P_PWM_LOW + 0x8000;
NRF_PWM2->PSEL.OUT[0] = (PIN_POS << PWM_PSEL_OUT_PIN_Pos) | (PIN_POS << PWM_PSEL_OUT_PORT_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos);
NRF_PWM2->PSEL.OUT[1] = (PIN_NEG << PWM_PSEL_OUT_PIN_Pos) | (PIN_NEG << PWM_PSEL_OUT_PORT_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos);
NRF_PWM2->MODE = (PWM_MODE_UPDOWN_Up << PWM_MODE_UPDOWN_Pos);
NRF_PWM2->PRESCALER = (PWM_PRESCALER_PRESCALER_DIV_1 << PWM_PRESCALER_PRESCALER_Pos);
NRF_PWM2->COUNTERTOP = (CounterTopRegister << PWM_COUNTERTOP_COUNTERTOP_Pos);
NRF_PWM2->LOOP = (0 << PWM_LOOP_CNT_Pos);
NRF_PWM2->DECODER = (PWM_DECODER_LOAD_Individual << PWM_DECODER_LOAD_Pos) | (PWM_DECODER_MODE_RefreshCount << PWM_DECODER_MODE_Pos);
NRF_PWM2->SEQ[0].PTR = ((uint32_t)(initialSequence) << PWM_SEQ_PTR_PTR_Pos);
NRF_PWM2->SEQ[0].CNT = 44;
NRF_PWM2->SEQ[0].REFRESH = cyclesPerBit - 1;
NRF_PWM2->SEQ[0].ENDDELAY = 0;
}
void TxWrite(uint8_t txVal)
{
int i;
// Generate the Startbit (LOW)
initialSequence[0] = P_PWM_LOW;
initialSequence[1] = N_PWM_LOW;
initialSequence[2] = 0;
initialSequence[3] = 0;
// Generate the 8 databits
for (i = 1; i < 9; i++)
{
if (txVal & 1)
{
// Bit is HIGH
initialSequence[4 * i + 0] = P_PWM_HIGH;
initialSequence[4 * i + 1] = N_PWM_HIGH;
}
else
{
// Bit is LOW
initialSequence[4 * i + 0] = P_PWM_LOW;
initialSequence[4 * i + 1] = N_PWM_LOW;
}
initialSequence[4 * i + 2] = 0;
initialSequence[4 * i + 3] = 0;
txVal = txVal >> 1;
}
// Generate the Stopbit (HIGH)
initialSequence[36] = P_PWM_HIGH;
initialSequence[37] = N_PWM_HIGH;
initialSequence[38] = 0;
initialSequence[39] = 0;
initialSequence[40] = P_PWM_HIGH;
initialSequence[41] = N_PWM_HIGH;
initialSequence[42] = 0;
initialSequence[43] = 0;
NRF_PWM2->ENABLE = (PWM_ENABLE_ENABLE_Enabled << PWM_ENABLE_ENABLE_Pos);
NRF_PWM2->TASKS_SEQSTART[0] = 1;
}
void TxWaitDone()
{
while (NRF_PWM2->EVENTS_SEQEND[0] == 0)
;
NRF_PWM2->EVENTS_SEQEND[0] = 0;
}
void TxStop()
{
NRF_PWM2->TASKS_STOP = 1;
while (NRF_PWM2->EVENTS_STOPPED == 0)
;
NRF_PWM2->EVENTS_STOPPED = 0;
NRF_PWM2->ENABLE = (PWM_ENABLE_ENABLE_Disabled << PWM_ENABLE_ENABLE_Pos);
}
WriteMessage(uint8_t *msg, uint8_t len)
{
nrfx_lpcomp_disable();
NRFX_IRQ_DISABLE(SAADC_IRQn);
for (int i = 0; i < len; i++)
{
TxWrite(msg[i]);
TxWaitDone();
TxStop();
}
lpcomp_event_count = 0;
is_carrier_found = 0;
NRFX_IRQ_ENABLE(COMP_LPCOMP_IRQn);
nrfx_lpcomp_enable();
return 0;
}
The issue with this approach, again, is the while loops that, among other issues, can sometimes get stuck and hang the rest of the process.
The actual issue rewriting this with NRFX drivers is the fact that I cannot, for the life of me, figure out how to write out my "initialSequence." I can get the PWM to toggle on or off, but not actually make it do that in sequence as I need it to. I tried following a few examples I found on Devzone, but nothing concrete enough to help me with my issue.
The HAL Implementation repeats every 100 milliseconds, so the NRFX one should be able to match that. If anyone has an idea of how to write this using the NRFX drivers, or to point me in the direction of a set-up example, I'd be very grateful.
To add to this: The idea is for this code to run along with a Zephyr based system that runs the rest of the functionality of the board (Thus why we're trying to make it event based as opposed to current implementation).
Thank you in advanced for response. If you need any more information, please ask.
EDIT: Added the missing code that was calling the TX sequence in order. (Write, Wait, Stop)
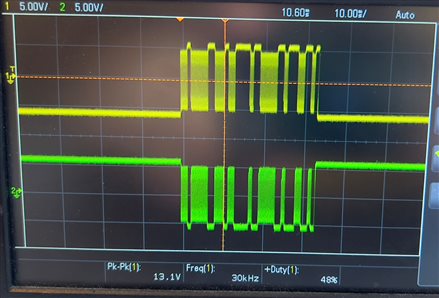 I feel I should add the way the signal looks as well with HAL(first picture) and
I feel I should add the way the signal looks as well with HAL(first picture) and 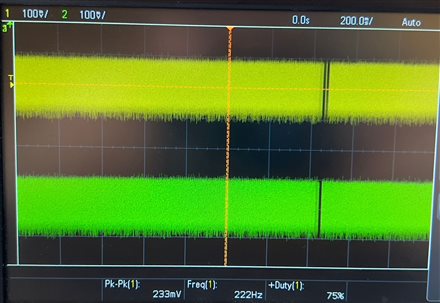 NRFX (Second picture)
NRFX (Second picture)