I'm trying to do something extremely simple but can't get it to work. Through the dev academy, I successfully loaded up and executed exercise 1. However, when I then try to "Create a New Application" (rather than "Add and existing appliction), running the exact same main.c code, I am not able to toggle the LEDs and none of the GPIOs seem to be configured. I'm guessing this has something to do with the generated files, but I don't know where to start looking. Please help!
BTW - I am able to attach with the debugger and see that the initialization seems to be completing without error and function call to the gpio toggle also returns with no error. main.c code for both applications is the following:
const struct device *dev0;
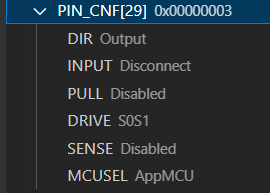
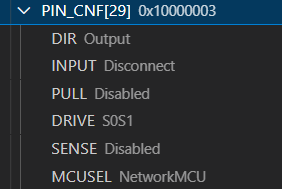
const int PIN=29;
bool led_is_on = true;
int ret;
dev0 = DEVICE_DT_GET(DT_NODELABEL(gpio0));
if (dev0==NULL) {
printk("device not found");
return;
}
if (!device_is_ready(dev0)) {
printk("GPIO controller not ready");
return -ENODEV;
}
gpio_pin_configure(dev0, PIN, GPIO_OUTPUT);
while(1) {
gpio_pin_toggle(dev0, PIN);
k_msleep(SLEEP_TIME_MS);
}