Hi Nordic Team
I have been successfully using the nRF52840DK to create various Bluetooth sensors, including a thermometer sensor.
I bought a nRF9160DK with the intent to create an IoT thermometer sensor using NB-IoT.
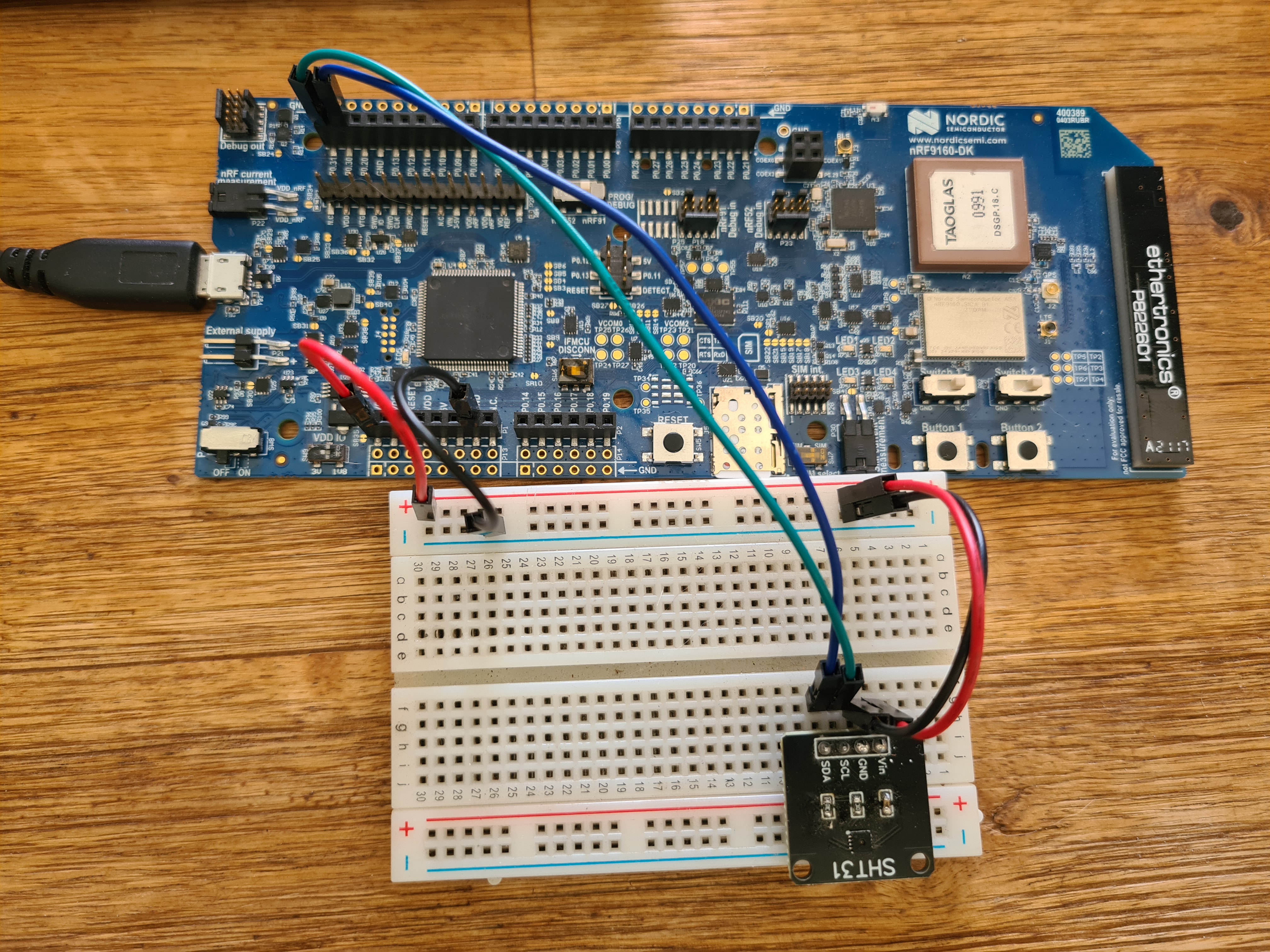
I am having trouble getting the nRF9160 to recognise/find the attached SHT31 sensor. I have used this exact same sensor with the 52840 Dev Kit without any issues, so I thought connecting it to the 9160DK should be simple...
I have tried a number of different approaches but I can't seem to get this working. Could you please have a look and let me know if I am doing anything wrong with the setup or connecting the sensor to the 9160DK?
I created a very basic app (attached) which I think should include all the elements to get this sensor identified and connected. The app compiles but the output is always "Could not get SHT3XD device".
I have tested the sensor on another board (not a 9160DK) and it is working.
The sensor datasheet says it can operate from 2.5v to 5.5v so I tried switching between 1.8v and 3v using SW9 on the 9160DK with no change.
There is definitely voltage going to the sensor. I even tested the wires and they are all fine. Not sure what else to look for.
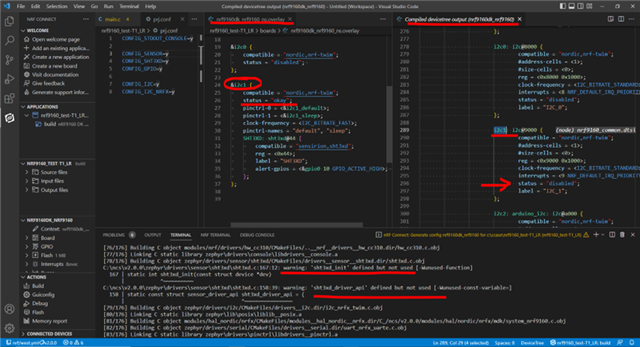
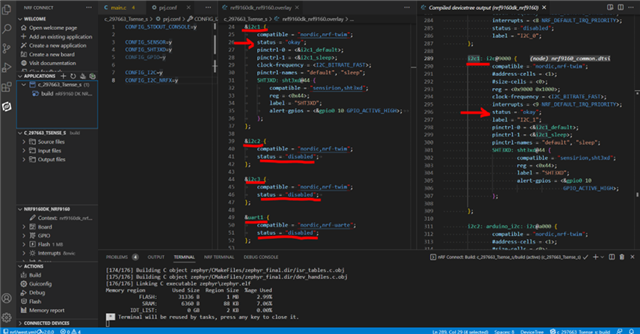
Overlay file:
prj.conf file:
Any help would be very much apprecaited.
Regards
Garysht31.zip