
Hello,
I have an application and I am using a nrf52833, as soon as i flash my application I am getting a hardfault prior to the main call.
As in below snap:
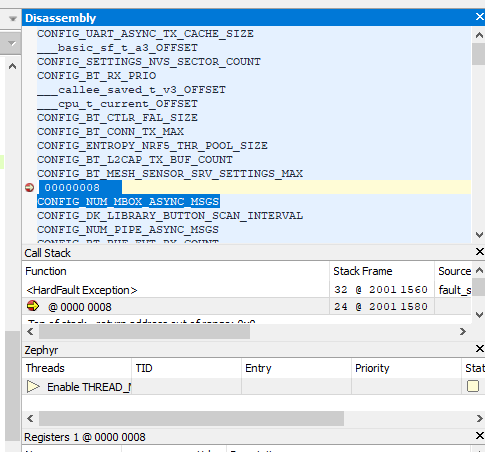
I do not know what to make of this, kindly suggest.
Thanks,
Hello,
I have an application and I am using a nrf52833, as soon as i flash my application I am getting a hardfault prior to the main call.
As in below snap:
I do not know what to make of this, kindly suggest.
Thanks,

