Hi There,
Environment Description:
1. nRF Connect for VS Code v2023.1.44.
1. NCS Version v2.0.0.
2. Zephyr v3.0.99-ncs1.
3. MCUBoot v1.9.99
4. NRF52840.
5. NRF Connect mobile app Android v 4.26.0 Mobile app IOS V 2.6.
I am currently working on the implementation of OTA DFU using BLE, I have successfully implemented this functionality after following the documentation here., However there are some questions and perhaps missing functionality to fulfill our product's requirements, taking into account that our product consists of an LCD which should display the state of the update as it goes along.
By using these image management callbacks I am able to get the start of the DFU process as well as the DFU Pending event, nonetheless there is a discrepancy depending on which kind of device is used to perform for instance:
static void dfuStartedCb(void){ LOG_ERR("STARTTING DFU"); }
static void dfuStoppedCb(void){ LOG_ERR("STOPPED DFU"); }
static void dfuPendingCb(void){ LOG_ERR("PENDING DFU"); }
static void dfuConfirmedCb(void){ LOG_ERR("CONFIRMED DFU"); }
const struct img_mgmt_dfu_callbacks_t dfu_callbacks = {
.dfu_started_cb = dfuStartedCb,
.dfu_stopped_cb = dfuStoppedCb,
.dfu_pending_cb = dfuPendingCb,
.dfu_confirmed_cb = dfuConfirmedCb,
};
From an Android the workflow is as follows:
1. DFU Started form mobile phone -> 2. Get DFU Started Callback. -> 3. ~ 30 Seconds transferring the image. -> 4. Device goes into MCUBoot .... -> 5. ~30-40 Seconds later, Device resets. -> 6. get the Image confirmed callback.
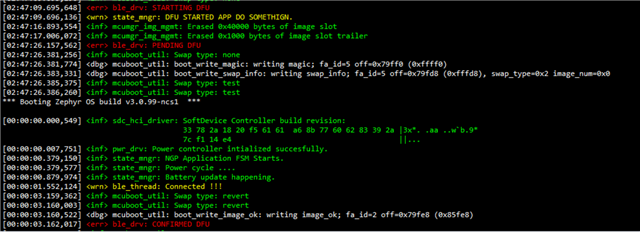
Question 1: Why does step 5 take that long ? ( After Jumping to the first Image slot ).
2. From an iPhone However the workflow changes slightly as the confirmed callback is never received by the application, Which makes it tricky to display user updates:
Question 2: Why does the update from iPhone does generate the Confirmed callback ?
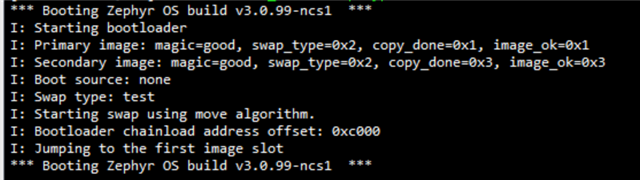
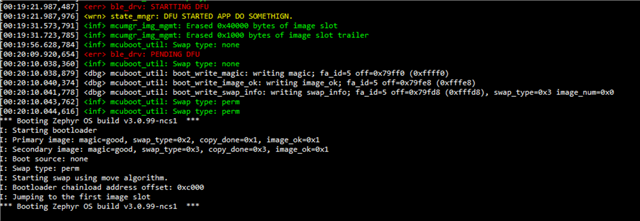
Question 3: Why are the swap types different (Android -> "Swap type: test", iPhone -> "Swap type: perm") ?
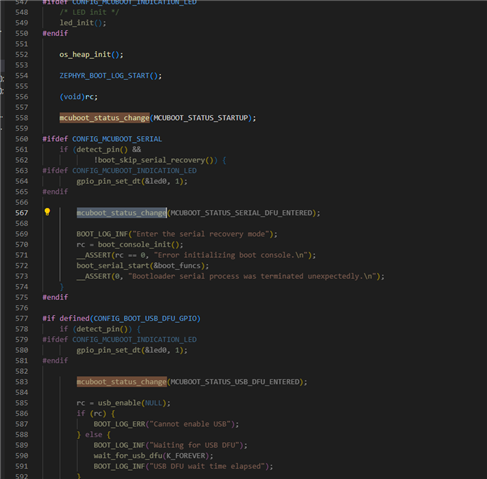
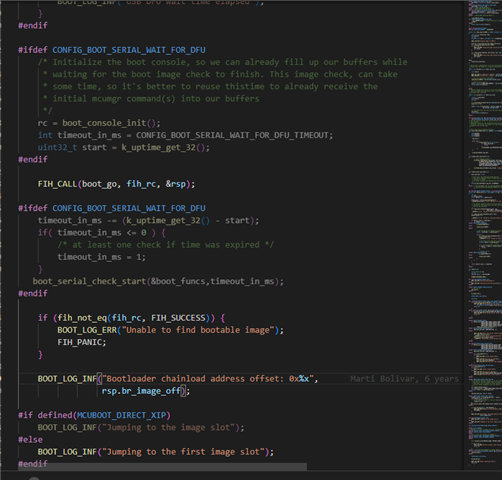
Finally, I would very much appreciate advise in regards to obtaining MCUBoot status actions in order to update the LCD accordingly while the bootloader is doing its magic, I did have a look online and found a couple of references to CONFIG_MCUBOOT_ACTION_HOOKS here, unfortunately it seems to be undefined when included in my child_image/mcuboot.conf file.
Question 3: What is the best way to obtain MCUBoot actions to execute my own code ( is there a sample for this ) ?
MCUBoot Configuration:
#################################### Power Management ########################################## CONFIG_PM=n CONFIG_MAIN_STACK_SIZE=20480 CONFIG_MBEDTLS_CFG_FILE="mcuboot-mbedtls-cfg.h" ####################################### Boot Signature ########################################## CONFIG_BOOT_ENCRYPT_RSA=n CONFIG_BOOT_ENCRYPT_EC256=n CONFIG_BOOT_ENCRYPT_X25519=n CONFIG_BOOT_SIGNATURE_TYPE_RSA=y CONFIG_BOOT_SIGNATURE_TYPE_RSA_LEN=3072 CONFIG_BOOT_SIGNATURE_KEY_FILE="ngp_sign_rsa-3072.pem" ################################### Boot Configurations ########################################## CONFIG_BOOT_UPGRADE_ONLY=n CONFIG_BOOT_BOOTSTRAP=n CONFIG_BOOT_VALIDATE_SLOT0=y CONFIG_BOOT_SWAP_SAVE_ENCTLV=n ##################################### Clock Configuration ######################################## CONFIG_CLOCK_CONTROL_NRF_K32SRC_RC=y # See DRGN-15979: at https://developer.nordicsemi.com/nRF_Connect_SDK/doc/latest/nrf/known_issues.html CONFIG_CLOCK_CONTROL_NRF_K32SRC_RC_CALIBRATION=y ######################################## Flash Configuration ###################################### CONFIG_FLASH=y CONFIG_FPROTECT=y CONFIG_DISABLE_FLASH_PATCH=y ######################################## Console Logs Configuration ################################ CONFIG_LOG=y CONFIG_CONSOLE=y CONFIG_USE_SEGGER_RTT=y CONFIG_RTT_CONSOLE=y CONFIG_SERIAL=n CONFIG_LOG_MODE_MINIMAL=y CONFIG_NRF_RTC_TIMER_USER_CHAN_COUNT=0 ######################################### Optimizations ########################################### CONFIG_SIZE_OPTIMIZATIONS=y
Main project Configuration:
CONFIG_SYSTEM_WORKQUEUE_STACK_SIZE=8192 #################################### BLE Configuration ################################# CONFIG_BT=y CONFIG_BT_DEBUG_LOG=n CONFIG_BT_PERIPHERAL=y CONFIG_BT_DEVICE_NAME="NGP-BL" #BLE Allow connection parameters update. CONFIG_BT_USER_DATA_LEN_UPDATE=y CONFIG_BT_GAP_AUTO_UPDATE_CONN_PARAMS=y # BLE connection interval suggestion. CONFIG_BT_PERIPHERAL_PREF_MAX_INT=20 CONFIG_BT_PERIPHERAL_PREF_MIN_INT=20 #BLE Buffering configuration. CONFIG_BT_GATT_CLIENT=y CONFIG_BT_ATT_PREPARE_COUNT=20 CONFIG_BT_BUF_ACL_TX_COUNT=20 CONFIG_BT_BUF_ACL_RX_COUNT=20 CONFIG_BT_L2CAP_TX_MTU=498 CONFIG_BT_BUF_ACL_RX_SIZE=502 CONFIG_BT_BUF_ACL_TX_SIZE=502 CONFIG_BT_CTLR_DATA_LENGTH_MAX=251 # Bluetooth PHY selection. CONFIG_BT_CTLR_PRIVACY=n CONFIG_BT_USER_PHY_UPDATE=y CONFIG_BT_CTLR_PHY_2M=y # BLE Configuration. CONFIG_BT_DEVICE_NAME_DYNAMIC=y ##################################### Power Management ######################################### CONFIG_PM=y # Required to disable default behavior of deep sleep on timeout CONFIG_PM_DEVICE=y CONFIG_REBOOT=y #################################### Peripheral Configuration ################################### CONFIG_GPIO=y CONFIG_GPIO_AS_PINRESET=y CONFIG_I2C=y ################################# Native peripheral configuration ############################### CONFIG_NRFX_PPI=y CONFIG_NRFX_TIMER2=y CONFIG_NRFX_TIMER1=y CONFIG_NRFX_SAADC=y # Enable the UART driver CONFIG_UART_ASYNC_API=y CONFIG_NRFX_UARTE0=y CONFIG_SERIAL=y ############################### Multiprotocol service layer. #################################### CONFIG_MPSL=y ########################################## Utilities ########################################### # Allow use of sprintf and print CONFIG_NEWLIB_LIBC=y CONFIG_NEWLIB_LIBC_FLOAT_PRINTF=y ####################################### FOTA Configuration ##################################### # Device firmware update (DFU) configuation CONFIG_MCUMGR=y # Bootloader configuration CONFIG_BOOTLOADER_MCUBOOT=y # Ensure an MCUboot-compatible binary is generated # Enable the Bluetooth mcumgr transport (unauthenticated). CONFIG_MCUMGR_SMP_BT=y CONFIG_MCUMGR_SMP_BT_AUTHEN=n CONFIG_MCUMGR_SMP_BT_CONN_PARAM_CONTROL=y # Enable the mcumgr Packet Reassembly feature over Bluetooth and its configuration dependencies. # MCUmgr buffer size is optimized to fit one SMP packet divided into five Bluetooth Write Commands, # transmitted with the maximum possible MTU value: 498 bytes. CONFIG_MCUMGR_SMP_REASSEMBLY_BT=y CONFIG_MCUMGR_BUF_SIZE=2475 CONFIG_OS_MGMT_MCUMGR_PARAMS=y # Required by the `taskstat` command. CONFIG_THREAD_MONITOR=y # Support for taskstat command CONFIG_OS_MGMT_TASKSTAT=y # Enable statistics and statistic names. CONFIG_STATS=y CONFIG_STATS_NAMES=y # LOG Level for MCUBoot CONFIG_MCUBOOT_UTIL_LOG_LEVEL_DBG=y # Required for rebooting CONFIG_MCUMGR_CMD_OS_MGMT=y CONFIG_MCUMGR_CMD_IMG_MGMT=y CONFIG_MCUBOOT_IMG_MANAGER=y ######################################## Console Logs Configuration ################################ # Enable console CONFIG_CONSOLE=y # Enable RTT logging. CONFIG_USE_SEGGER_RTT=y CONFIG_RTT_CONSOLE=y # Logging subsystem configuration CONFIG_LOG=y CONFIG_LOG_MODE_IMMEDIATE=y # Use this mode for time sensitive logging # CONFIG_LOG_MODE_DEFERRED=y # CONFIG_LOG_BUFFER_SIZE=2048 CONFIG_LOG_BACKEND_SHOW_COLOR=y CONFIG_LOG_INFO_COLOR_GREEN=y # Disable Logs from I2C driver, may turnback on for debugging. CONFIG_I2C_LOG_LEVEL_OFF=y ################################### Clock Configuration ######################################## CONFIG_CLOCK_CONTROL_NRF_K32SRC_RC=y # See DRGN-15979: at https://developer.nordicsemi.com/nRF_Connect_SDK/doc/latest/nrf/known_issues.html CONFIG_CLOCK_CONTROL_NRF_K32SRC_RC_CALIBRATION=y ################################### Dynamic Memory Allocation ################################## CONFIG_HEAP_MEM_POOL_SIZE=4096
Cheers !