Hello, I want to get GPS location information with nRF52840, I use UART protocol at 9600 baud rate, but I cannot read the data regularly, how should I do?
Hello, I want to get GPS location information with nRF52840, I use UART protocol at 9600 baud rate, but I cannot read the data regularly, how should I do?
Hi there,
Which GPS device are you using and are you able to get some data at all?
How are you currently trying to read out the data?
regards
Jared

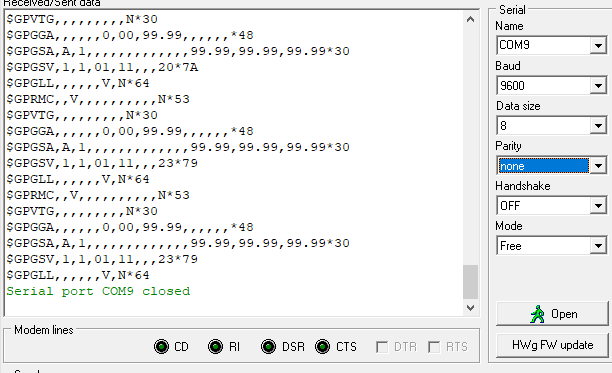
Hi, I am using ublox NEO-6M-0-001. data is meaningless, comes in different characters, does not come in $GPGGA standard

Hi,
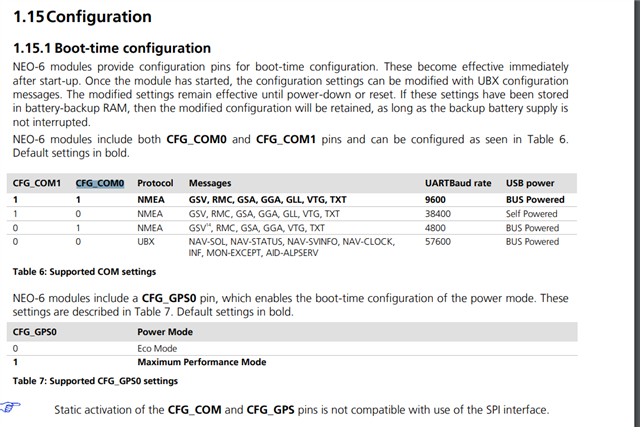
What is the level of VDD and do you set CFG_COM1 and CFG_COM0 high during boot to the board to the correct baud rate?
regards
Jared
Hi, VDD level is 3.3V. What are CFG_COM0 and CFG_COM1? baud rate set to 9600
Berkay Dudu said:What are CFG_COM0 and CFG_COM1? baud rate set to 9600
They set the baudrate and protocol of the GPS according to the datasheet:
Are you using an existing driver for device?
regards
Jared
Berkay Dudu said:What are CFG_COM0 and CFG_COM1? baud rate set to 9600
They set the baudrate and protocol of the GPS according to the datasheet:
Are you using an existing driver for device?
regards
Jared
yes i am using existing driver made necessary adjustments according to datasheet
Hi,
Can you share a trace from a logic analyzer that shows the data on RX and TX when you request GPS location?
Berkay Dudu said:yes i am using existing driver made necessary adjustments according to datasheet
Can you show me this in your code?
regards
Jared
Hi
Sorry I havent logic analyzer device, therefor I will send the code
#include <stdbool.h>
#include <stdint.h>
#include <stdio.h>
#include "app_uart.h"
#include "app_error.h"
#include "nrf_delay.h"
#include "nrf.h"
#include "bsp.h"
#if defined (UART_PRESENT)
#include "nrf_uart.h"
#endif
#if defined (UARTE_PRESENT)
#include "nrf_uarte.h"
#endif
//#define ENABLE_LOOPBACK_TEST /**< if defined, then this example will be a loopback test, which means that TX should be connected to RX to get data loopback. */
#define MAX_TEST_DATA_BYTES (15U) /**< max number of test bytes to be used for tx and rx. */
#define UART_TX_BUF_SIZE 256 /**< UART TX buffer size. */
#define UART_RX_BUF_SIZE 256 /**< UART RX buffer size. */
void uart_error_handle(app_uart_evt_t * p_event)
{
if (p_event->evt_type == APP_UART_COMMUNICATION_ERROR)
{
APP_ERROR_HANDLER(p_event->data.error_communication);
}
else if (p_event->evt_type == APP_UART_FIFO_ERROR)
{
APP_ERROR_HANDLER(p_event->data.error_code);
}
}
#ifdef ENABLE_LOOPBACK_TEST
/* Use flow control in loopback test. */
#define UART_HWFC APP_UART_FLOW_CONTROL_ENABLED
/** @brief Function for setting the @ref ERROR_PIN high, and then enter an infinite loop.
*/
static void show_error(void)
{
bsp_board_leds_on();
while (true)
{
// Do nothing.
}
}
/** @brief Function for testing UART loop back.
* @details Transmitts one character at a time to check if the data received from the loopback is same as the transmitted data.
* @note @ref TX_PIN_NUMBER must be connected to @ref RX_PIN_NUMBER)
*/
static void uart_loopback_test()
{
uint8_t * tx_data = (uint8_t *)("\r\nLOOPBACK_TEST\r\n");
uint8_t rx_data;
// Start sending one byte and see if you get the same
for (uint32_t i = 0; i < MAX_TEST_DATA_BYTES; i++)
{
uint32_t err_code;
while (app_uart_put(tx_data[i]) != NRF_SUCCESS);
nrf_delay_ms(10);
err_code = app_uart_get(&rx_data);
if ((rx_data != tx_data[i]) || (err_code != NRF_SUCCESS))
{
show_error();
}
}
return;
}
#else
/* When UART is used for communication with the host do not use flow control.*/
#define UART_HWFC APP_UART_FLOW_CONTROL_DISABLED
#endif
/**
* @brief Function for main application entry.
*/
int main(void)
{
uint32_t err_code;
bsp_board_init(BSP_INIT_LEDS);
const app_uart_comm_params_t comm_params =
{
RX_PIN_NUMBER,
TX_PIN_NUMBER,
RTS_PIN_NUMBER,
CTS_PIN_NUMBER,
UART_HWFC,
false,
#if defined (UART_PRESENT)
NRF_UART_BAUDRATE_9600
#else
NRF_UARTE_BAUDRATE_9600
#endif
};
APP_UART_FIFO_INIT(&comm_params,
UART_RX_BUF_SIZE,
UART_TX_BUF_SIZE,
uart_error_handle,
APP_IRQ_PRIORITY_LOWEST,
err_code);
APP_ERROR_CHECK(err_code);
#ifndef ENABLE_LOOPBACK_TEST
printf("\r\nUART example started.\r\n");
while (true)
{
//char a[100];
uint8_t cr;
//uint8_t i;
//double cr;
//while (app_uart_get(&cr) != NRF_SUCCESS);
//while (app_uart_put(cr) != NRF_SUCCESS);
//if (cr == 't' || cr == 'Q')
//{
// printf(" \r\nExit!\r\n");
// while (true)
// {
// bsp_board_leds_on();
// }
//}
if(app_uart_get(&cr) != NRF_SUCCESS)
{
printf(cr,'\r\n');
nrf_delay_ms(500);
}
//else
//{
// //printf("i degeri : %d", i);
// printf(cr);
// nrf_delay_ms(500);
//}
}
#else
// This part of the example is just for testing the loopback .
while (true)
{
uart_loopback_test();
}
#endif
}
Hi,
Where in the code that you've shared do you use the driver to configure the GPS?
regards
Jared
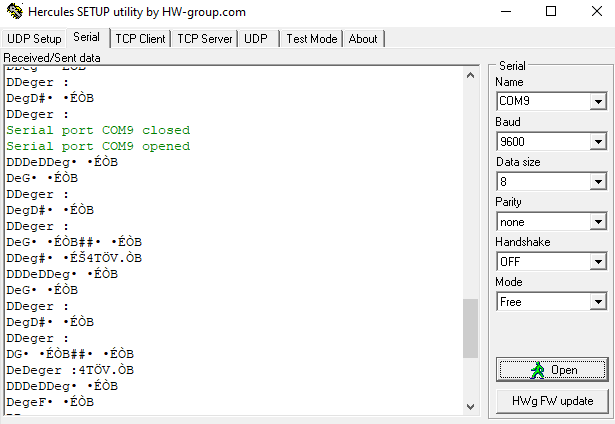
When the code added the line "flow_control = APP_UART_FLOW_CONTROL_DISABLED" and changed the location of the pins on the board, the data came in this way, but upload different codes and the same data is coming. How can I control the future and how can I filter it?