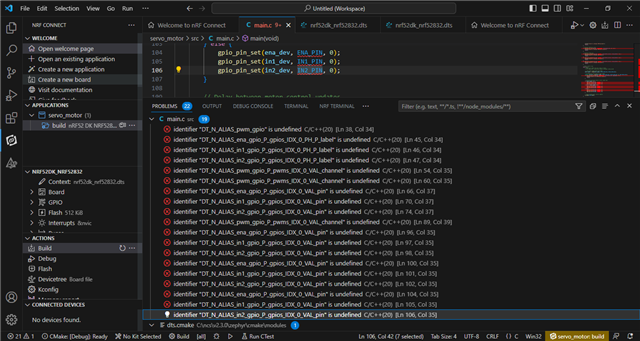
Hello everyone. I've started coding with Zephyr on my nRF52 device. I'm relatively new to this. I'm trying to drive a DC motor with L298N. However, I have no idea how to configure the pin settings in the device tree. I have defined the motor pins in the device tree, but when I try to use them in main.c, I get an error saying they are not defined. Can someone help me understand how to use the device tree? Thank you.