Hi All,
I am running into an issue where the data returned from nrfx_spim_xfer() does not match what is being transmitted on the line. More details below.
MCU: nrf52832
SDK: nRF5 17.1.0
IDE: Segger 5.70a
Here is an example of the issue. When trying to read a register of an AFE using SPI, we can see this data being transmitted using a logic analyzer:
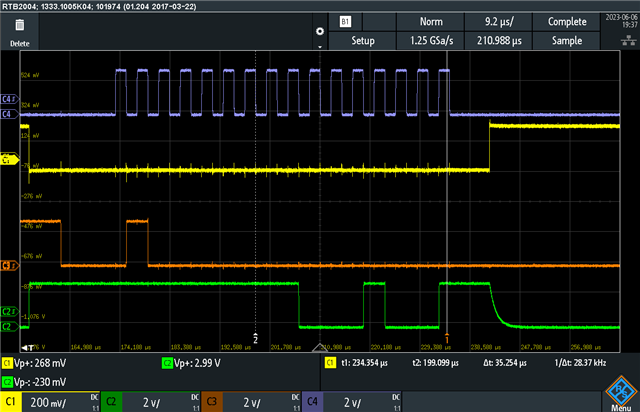
As shown in the scope screenshot, it would appear that the data on the MISO line (green plot in picture), would represent a value of 0xFF then 0x89. In the debugger, the data that appears in the rx_buffer appears as so:
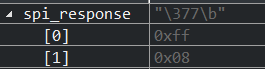
This issue occurs on several different occasions, where 1 or 2 HIGH bits appear to be missed.
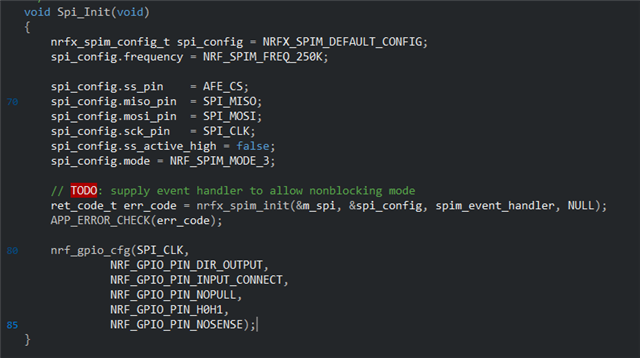
Below are the SPI init settings being used:
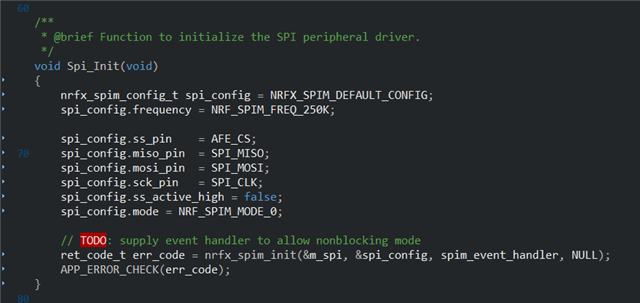
SPI Mode 0 was confirmed to us by the AFE manufacturer to be the correct SPI mode for the device. Let me know if any other information would be helpful, thanks!