Hi,
I'm trying to test the MPU9250 included on the Thingy52
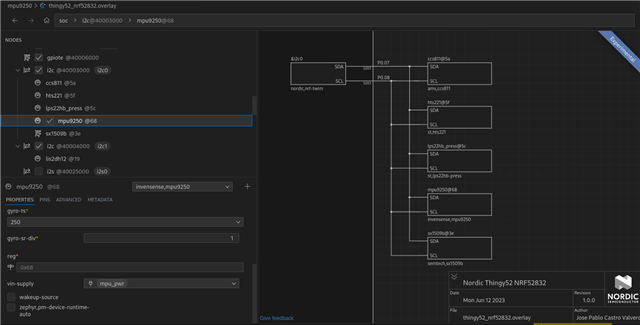
My Overlay file:
&i2c0 { mpu9250: mpu9250@68 { compatible = "invensense,mpu9250"; reg = <0x68>; status = "okay"; friendly-name = "MPU9250"; irq-gpios = <&gpio0 06 GPIO_ACTIVE_HIGH>; accel-fs = < 2 >; accel-dlpf = "218.1"; gyro-fs = < 250 >; gyro-dlpf = < 250 >; gyro-sr-div = < 1 >; vin-supply = <&mpu_pwr>; };};&mpu_pwr { status = "okay"; regulator-always-on;};
My prj.conf
CONFIG_STDOUT_CONSOLE=yCONFIG_PRINTK=yCONFIG_LOG=yCONFIG_LOG_PRINTK=yCONFIG_LOG_MODE_IMMEDIATE=yCONFIG_I2C=yCONFIG_I2C_LOG_LEVEL_DBG=yCONFIG_SENSOR=yCONFIG_MPU9250=yCONFIG_MPU9250_TRIGGER_GLOBAL_THREAD=yCONFIG_CBPRINTF_FP_SUPPORT=yLogging messages:
[00:00:00.342,468] <err> regulator_fixed: GPIO port: sx1509b@3e not ready[00:00:00.350,250] <err> regulator_fixed: GPIO port: sx1509b@3e not ready[00:00:00.363,006] <inf> sx1509b: sx1509b@3e init ok[00:00:00.399,597] <inf> CCS811: App FW 1100[00:00:00.410,949] <inf> lis2dh: fs=2, odr=0x4 lp_en=0x0 scale=9576[00:00:00.419,006] <err> i2c_nrfx_twim: Error 0x0BAE0001 occurred for message 0[00:00:00.427,368] <err> MPU9250: Failed to read chip ID.*** Booting Zephyr OS build v3.3.99-ncs1 ***Did I missed something?
Suggestions?
Thanks and Best Regards,
JP