Dear Support team,
I'm involved in the activity to migrate to NCS a project already developed & successfuly tested with using nRF52 SDK v17.1.0, over the custom board initially designed.
That custom board is based on nRF52832_xxAA, battery powered, equipped with an inertial sensor from STM (MEMS) over SPI0, and a 8Mbit flash memory over SPI1, plus some LEDs and one button. The original .dts file is contained in the folder "<ncs_path>\v2.4.0\zephyr\boards\arm\nrf52dk_nrf52832" successfully overlayed for what concerns the custom I/O mapping. Indeed, everything is working fine without MCUBOOT (I'll add it as a final step when everything will be fixed), until I decided to check the power absorbment from the battery that reported around 150 microAmps in "idle" mode (advertising active and the whole system waiting for events).
As I expect an absorbment from 10 to 20 microAmp, I decided to start from the beginning: the "empty" main as reported below:
int main(void)
{
while(1)
NRF_POWER->SYSTEMOFF = 1;
return 0;
}
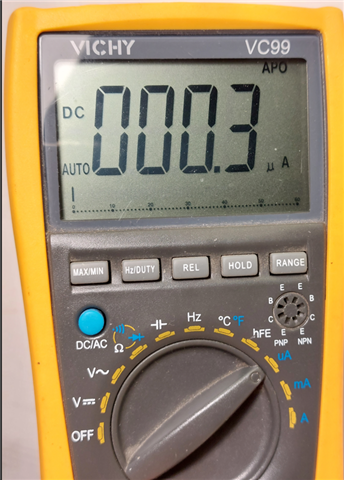
This "empty" main reports 30.0 microAmps (NCS) against the 0.30 microAmps reported by the same "empty" main in the APP built with SDK v17.1.0, anyone could tell me whats's possibly wrong ?
PS: "CONFIG_SERIAL=n" has been applied already as many posts seeemed to be resolutive, also in the overlay "&uart0" is stated as "disabled".
PS #2: already included and built some examples from zephyr/samples/bluetooth (only advertising just to remain basic) and I never saw an absorbment less than 100 microAmps, therefore I can't exclude the extension nRF Connect for VSCode, as it's common to all test made so far