Hello devzone,
I am using Nordic's NUS(Nordic uart service) example and i changed pin configuration to according to our custom board.
TX_done callback working fine but there is a problem with RX_done callback it is not triggering once in a while
here is a code snippet regarding the problem
static const struct device *uart = DEVICE_DT_GET(DT_NODELABEL(uart0));
static struct k_work_delayable uart_work;
K_SEM_DEFINE(nus_write_sem, 0, 1);
struct uart_data_t
{
void *fifo_reserved;
uint8_t data[UART_BUF_SIZE];
uint16_t len;
};
static void uart_cb(const struct device *dev, struct uart_event *evt, void *user_data)
{
ARG_UNUSED(dev);
static size_t aborted_len;
struct uart_data_t *buf;
static uint8_t *aborted_buf;
static bool disable_req;
switch (evt->type)
{
case UART_TX_DONE:
// LOG_DBG("UART_TX_DONE");
// if ((evt->data.tx.len == 0) ||
// (!evt->data.tx.buf)) {
// return;
// }
// if (aborted_buf) {
// buf = CONTAINER_OF(aborted_buf, struct uart_data_t,
// data);
// aborted_buf = NULL;
// aborted_len = 0;
// } else {
// buf = CONTAINER_OF(evt->data.tx.buf,
// struct uart_data_t,
// data);
// }
// k_free(buf);
// buf = k_fifo_get(&fifo_uart_tx_data, K_NO_WAIT);
// if (!buf) {
// return;
// }
// if (uart_tx(uart, buf->data, buf->len, SYS_FOREVER_MS)) {
// LOG_WRN("Failed to send data over UART");
// }
break;
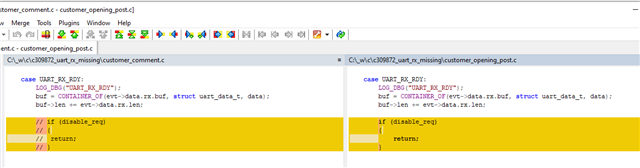
case UART_RX_RDY:
LOG_DBG("UART_RX_RDY");
buf = CONTAINER_OF(evt->data.rx.buf, struct uart_data_t, data);
buf->len += evt->data.rx.len;
if (disable_req)
{
return;
}
// TODO: newly added
// if (evt->data.rx.buf[buf->len - 1] == '\n')
if ((evt->data.rx.buf[buf->len - 1] == '\n') || (evt->data.rx.buf[buf->len - 1] == '\r'))
{
disable_req = true;
uart_rx_disable(uart);
data_from_host = 1;
memset(host_data, '\0', sizeof(host_data));
memcpy(host_data, evt->data.rx.buf, (strlen(evt->data.rx.buf) - 2));
}
break;
case UART_RX_DISABLED:
LOG_DBG("UART_RX_DISABLED");
disable_req = false;
//TODO:Commenting newly
buf = k_malloc(sizeof(*buf));
if (buf)
{
buf->len = 0;
}
else
{
LOG_WRN("Not able to allocate UART receive buffer");
k_work_reschedule(&uart_work, UART_WAIT_FOR_BUF_DELAY);
return;
}
uart_rx_enable(uart, buf->data, sizeof(buf->data),
UART_RX_TIMEOUT);
break;
case UART_RX_BUF_REQUEST:
LOG_DBG("UART_RX_BUF_REQUEST");
buf = k_malloc(sizeof(*buf));
if (buf)
{
buf->len = 0;
uart_rx_buf_rsp(uart, buf->data, sizeof(buf->data));
}
else
{
LOG_WRN("Not able to allocate UART receive buffer");
}
break;
case UART_RX_BUF_RELEASED:
LOG_DBG("UART_RX_BUF_RELEASED");
buf = CONTAINER_OF(evt->data.rx_buf.buf, struct uart_data_t,
data);
if (buf->len > 0)
{
k_fifo_put(&fifo_uart_rx_data, buf);
}
else
{
k_free(buf);
}
break;
case UART_TX_ABORTED:
LOG_DBG("UART_TX_ABORTED");
if (!aborted_buf)
{
aborted_buf = (uint8_t *)evt->data.tx.buf;
}
aborted_len += evt->data.tx.len;
buf = CONTAINER_OF(aborted_buf, struct uart_data_t,
data);
uart_tx(uart, &buf->data[aborted_len],
buf->len - aborted_len, SYS_FOREVER_MS);
break;
default:
break;
}
}
static void uart_work_handler(struct k_work *item)
{
struct uart_data_t *buf;
buf = k_malloc(sizeof(*buf));
if (buf)
{
buf->len = 0;
}
else
{
LOG_WRN("Not able to allocate UART receive buffer");
k_work_reschedule(&uart_work, UART_WAIT_FOR_BUF_DELAY);
return;
}
uart_rx_enable(uart, buf->data, sizeof(buf->data), UART_RX_TIMEOUT);
}
static int uart_init(void)
{
int err;
struct uart_data_t *rx;
if (!device_is_ready(uart))
{
LOG_ERR("UART device not ready");
return -ENODEV;
}
rx = k_malloc(sizeof(*rx));
if (rx)
{
rx->len = 0;
}
else
{
return -ENOMEM;
}
k_work_init_delayable(&uart_work, uart_work_handler);
err = uart_callback_set(uart, uart_cb, NULL);
if (err)
{
return err;
}
return uart_rx_enable(uart, rx->data, sizeof(rx->data),
UART_RX_TIMEOUT);
}
and am using NRF connect sdk (v2.3.0)