Hi all,
I'm developing a custom product based on the nrf5340 + nrf7002 that relies on BLE (and eventually wifi), and has an LCD screen (driven via LVGL), among other peripherals. All the codebase is being written in C++. We are using nRF Connect SDK v2.3.0 and zephyr-sdk-0.16.0 for the toolchain.
For debugging purposes we enabled the Log facility and the shell, both of them through RTT. Also, they are configured on their non-minimal variant.
We have a class that creates two control loop threads (think of their entry as an initialization stage plus a big while(true) that implements a PID controller and a k_yield() at the bottom). Both of them are created like this:
#define CONTROL_THREAD_PRIORITY 1
K_THREAD_STACK_DEFINE(CONTROL_THREAD_LEFT_STACK, 2048);
K_THREAD_STACK_DEFINE(CONTROL_THREAD_RIGHT_STACK, 2048);
// ...
k_tid_t id;
id = k_thread_create(
&m_control_threads[0], CONTROL_THREAD_LEFT_STACK,
K_THREAD_STACK_SIZEOF(CONTROL_THREAD_LEFT_STACK),
reinterpret_cast<k_thread_entry_t>(control_thread),
this, UINT_TO_POINTER(0), nullptr,
K_PRIO_PREEMPT(CONTROL_THREAD_PRIORITY), 0, K_NO_WAIT);
k_thread_name_set(id, "control_left");
id = k_thread_create(
&m_control_threads[1], CONTROL_THREAD_RIGHT_STACK,
K_THREAD_STACK_SIZEOF(WEIGHT_SELECTION_SUBSYSTEM_CONTROL_THREAD_RIGHT_STACK),
reinterpret_cast<k_thread_entry_t>(control_thread),
this, UINT_TO_POINTER(1), nullptr,
K_PRIO_PREEMPT(CONTROL_THREAD_PRIORITY), 0, K_NO_WAIT);
k_thread_name_set(id, "control_right");
// ...
void ControlSubsystem::control_thread(void* subsystem, void* p_side, void*)
{
ControlSubsystem* const SUBSYSTEM = reinterpret_cast<ControlSubsystem*>(subsystem);
const uint8_t SIDE = POINTER_TO_UINT(p_side);
LOG_INF("Starting control thread %s", (SIDE == 0) ? "LEFT" : "RIGHT");
while(true) {
// control stuff, basically read a setpoint from SUBSYSTEM and set the duty cycle of a PWM peripheral.
k_yield();
}
}
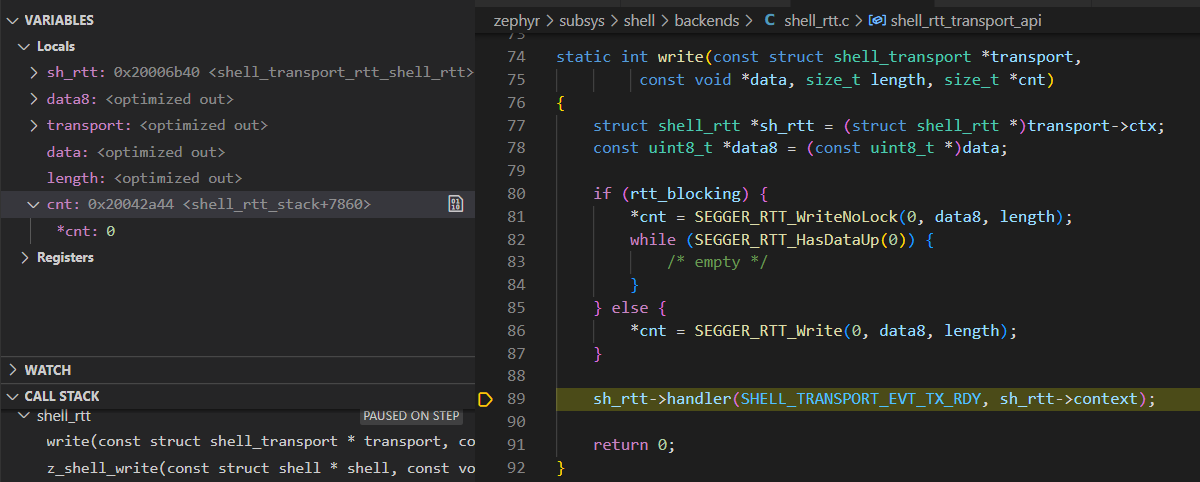
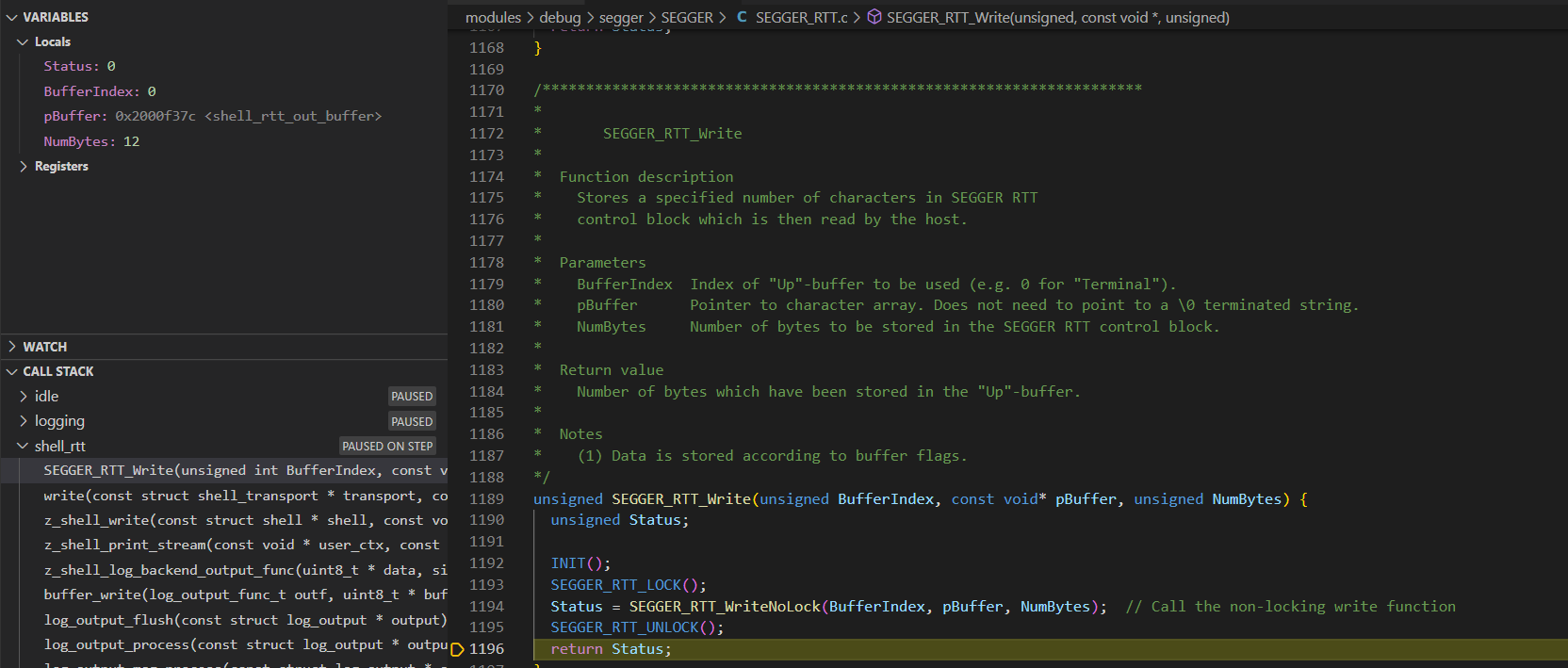
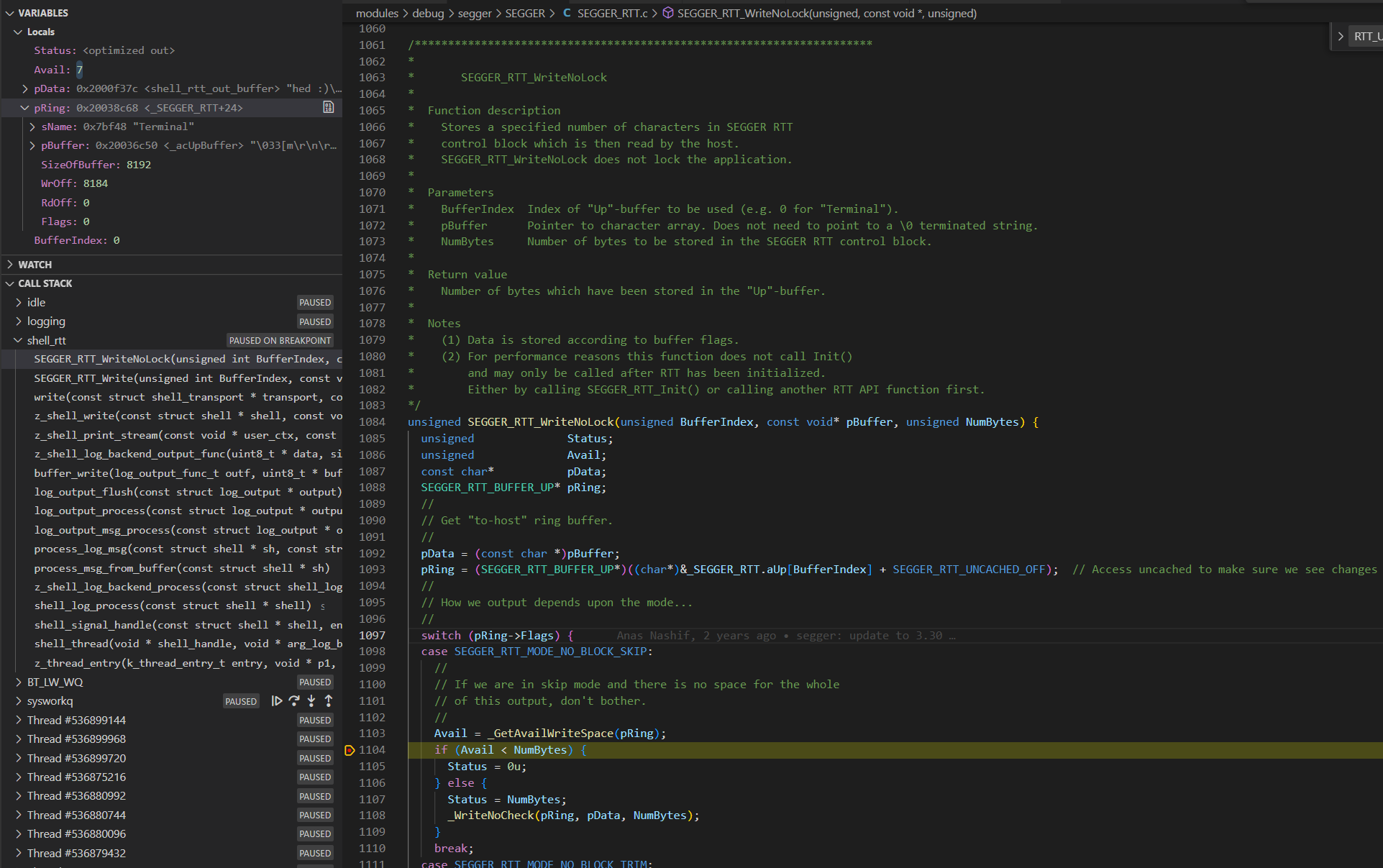
So far so good... Except that, when we turn a rotary encoder for changing the setpoint, the motors won't spin. Unless we connect through RTT: in that case, all LOG messages appear, the control loop start running and everything seems to be OK.
We were thinking about a priorities issue, so we used CONFIG_LOG_THREAD_CUSTOM_PRIORITY=y and LOG_THREAD_PRIORITY=5 to set a new priority to the log facility.
If we flash the new firmware and run the device standalone, the motors start working as we turn the encoder, which is good! But if this time we connect through RTT... Well, there are not any log messages, just the shell.
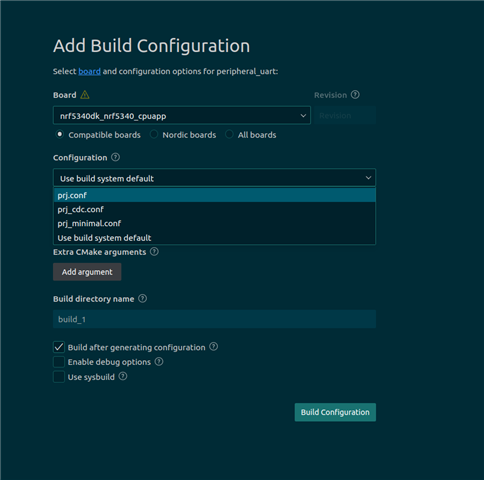
We tried several config options, and ended up having this one (regarding Log/Shell and misc configs):
CONFIG_CPLUSPLUS=y CONFIG_CPP_MAIN=y CONFIG_LIB_CPLUSPLUS=y CONFIG_FPU=y CONFIG_NEWLIB_LIBC=y CONFIG_NEWLIB_LIBC_FLOAT_PRINTF=y CONFIG_MAIN_STACK_SIZE=4096 # Debug Options. Comment them if needed CONFIG_DEBUG_OPTIMIZATIONS=y CONFIG_DEBUG_THREAD_INFO=y # Enable RTT CONFIG_USE_SEGGER_RTT=y CONFIG_SEGGER_RTT_MODE_NO_BLOCK_SKIP=y CONFIG_SEGGER_RTT_BUFFER_SIZE_DOWN=8192 CONFIG_SEGGER_RTT_BUFFER_SIZE_UP=8192 CONFIG_SEGGER_RTT_PRINTF_BUFFER_SIZE=8192 # Enable log on RTT CONFIG_LOG=y CONFIG_LOG_BACKEND_RTT=y CONFIG_LOG_BACKEND_RTT_BUFFER=1 CONFIG_LOG_BACKEND_RTT_MODE_DROP=y CONFIG_LOG_BACKEND_RTT_MODE_BLOCK=n CONFIG_LOG_BACKEND_RTT_BUFFER_SIZE=8192 CONFIG_LOG_BACKEND_UART=n # Log settings CONFIG_LOG_PRINTK=y CONFIG_LOG_MODE_DEFERRED=y CONFIG_LOG_MODE_OVERFLOW=y CONFIG_LOG_BLOCK_IN_THREAD=n CONFIG_LOG_BUFFER_SIZE=8192 CONFIG_LOG_PROCESS_THREAD=y CONFIG_LOG_PROCESS_THREAD_CUSTOM_PRIORITY=y # Conflicting conf here? CONFIG_LOG_PROCESS_THREAD_PRIORITY=5 CONFIG_LOG_PROCESS_THREAD_STACK_SIZE=4096 CONFIG_LOG_MODE_MINIMAL=n # Shell settings CONFIG_SHELL_THREAD_PRIORITY_OVERRIDE=y CONFIG_SHELL_THREAD_PRIORITY=1 CONFIG_PRINTK=y CONFIG_SHELL=y CONFIG_CONSOLE=y CONFIG_RTT_CONSOLE=y CONFIG_SHELL_BACKEND_RTT=y CONFIG_SHELL_BACKEND_SERIAL=n CONFIG_SHELL_MINIMAL=n CONFIG_SHELL_STACK_SIZE=8192 CONFIG_KERNEL_SHELL=y CONFIG_BOOT_BANNER=y CONFIG_DEVICE_SHELL=y CONFIG_STATS=y CONFIG_STATS_SHELL=y CONFIG_STDOUT_CONSOLE=y CONFIG_UART_CONSOLE=n CONFIG_SHELL_BACKEND_RTT_LOG_MESSAGE_QUEUE_SIZE=8192 CONFIG_SHELL_PROMPT_RTT="rtt:~$ "
However, no matter what combination we do, we end up in this kind of trade-off in which we have our system being functional but cannot read any message (which difficult further development) or we have our system with log messages, but cannot work standalone (which difficult testing for people who does not have access to a JTAG device).
Any help will be appreciated! It's the first time I'm posting on DevZone, so if I'm missing something, please let me know. Also, let me know if should I provide further details.
Thanks in advance!