I'm prototyping with a nRF9160 DK using nRF Connect SDK v2.4.0 and the Visual Code extension. I'm using an ADXL372z breakout board that I want to communicate with via SPI. When I've done this in the past using an nRF52840DK, the same ADXL372 breakout board and SDK 17, I have had to configure the GPIO pins used for SCLK and MOSI with NRF_GPIO_PIN_H0H1. I've also had to keep the clock frequency below 1MHz. This is because the jumper wire lengths between the DK and the breakout board make you need a bit more current than normal. Also without using twisted pair wiring with proper grounding, you have to keep line frequencies low.
short ADXL372_spi_master_init(nrf_drv_spi_t m_spi0_master,
nrf_drv_spi_evt_handler_t spi_event_handler,
bool *xferdone)
{
uint32_t err_code = 0;
m_ad_spi_master = m_spi0_master;
m_config.ss_pin = NRF_DRV_SPI_PIN_NOT_USED;
m_config.irq_priority = APP_IRQ_PRIORITY_LOW;
m_config.orc = 0xFF; // Most devices expect ones as filler/dummy bytes.
m_config.frequency = NRF_SPI_FREQ_8M;
m_config.mode = NRF_DRV_SPI_MODE_0; // Corresponds to the datasheet specification CPHA = CPOL = 0
m_config.bit_order = NRF_DRV_SPI_BIT_ORDER_MSB_FIRST; // Put it out the way you put it in
m_config.sck_pin = SPI_SCK_PIN;
m_config.mosi_pin = SPI_MOSI_PIN;
m_config.miso_pin = SPI_MISO_PIN;
err_code = nrf_drv_spi_init(&m_ad_spi_master, &m_config, spi_event_handler, NULL);
APP_ERROR_CHECK(err_code);
#if (USING_DEVELOPMENT_KIT == 1)
nrf_gpio_cfg(SPI_SCK_PIN,
NRF_GPIO_PIN_DIR_OUTPUT,
NRF_GPIO_PIN_INPUT_DISCONNECT,
NRF_GPIO_PIN_NOPULL,
NRF_GPIO_PIN_H0H1,
NRF_GPIO_PIN_NOSENSE);
nrf_gpio_cfg(SPI_MOSI_PIN,
NRF_GPIO_PIN_DIR_OUTPUT,
NRF_GPIO_PIN_INPUT_DISCONNECT,
NRF_GPIO_PIN_NOPULL,
NRF_GPIO_PIN_H0H1,
NRF_GPIO_PIN_NOSENSE);
#endif // (USING_DEVELOPMENT_KIT == 1)
spixferdone = xferdone;
m_spi_event_handler = spi_event_handler;
return (0);
}
This works for prototyping under SDK 17.
I need to do the same using nRF Connect SDK. I can't figure out where to use NRF_GPIO_DRIVE_H0H1 because I don't know how to configure individual GPIO pins under Zephyr. This is my current overlay file:
// To get started, press Ctrl+Space to bring up the completion menu and view the available nodes.
// For more help, browse the DeviceTree documentation at https: //docs.zephyrproject.org/latest/guides/dts/index.html
//
//
&pinctrl
{
spi3_default: spi3_default
{
group1
{
psels = <NRF_PSEL(SPIM_SCK, 0, 0)>,
<NRF_PSEL(SPIM_MOSI, 0, 1)>,
<NRF_PSEL(SPIM_MISO, 0, 2)>;
};
};
spi3_sleep: spi3_sleep
{
group2
{
psels = <NRF_PSEL(SPIM_SCK, 0, 0)>,
<NRF_PSEL(SPIM_MOSI, 0, 1)>,
<NRF_PSEL(SPIM_MISO, 0, 2)>;
low-power-enable;
};
};
};
/*** link SPI pin configurations with a device ***/
my_spi3: &spi3
{
compatible = "nordic,nrf-spim";
status = "okay";
pinctrl-0 = <&spi3_default>;
pinctrl-1 = <&spi3_sleep>;
pinctrl-names = "default", "Sleep";
cs-gpios = <&gpio0 4 GPIO_ACTIVE_LOW>, <&gpio0 29 GPIO_ACTIVE_LOW>;
winbondflash: flash@0
{
compatible = "winbond,w25n01", "jedec,spi-nor";
size = <1073741824>;
reg = <0>;
label = "1GBIT_FLASH_DEVICE";
spi-max-frequency = <1000000>;
jedec-id = [ EF AA 21 ]; //UNIQUE TO SPECIFIC FLASH CHIP BEING USED W25N01G
};
adxl372: spi-dev-adxl372@1
{
compatible = "adi,adxl372";
spi-max-frequency = <1000000>;
reg = <1>;
int1-gpios = <&gpio0 19 0>;
};
};
This is my initialization and use
#include "spi3.h"
#include <zephyr/kernel.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/drivers/pwm.h>
#include <zephyr/drivers/spi.h>
#include <zephyr/logging/log.h>
struct spi_cs_control adxl372_spi_cs =
{
.gpio = SPI_CS_GPIOS_DT_SPEC_GET(DT_NODELABEL(adxl372)),
.delay = 0,
};
static const struct spi_config adxl372_spi3_cfg =
{
.operation = SPI_WORD_SET(8) | SPI_TRANSFER_MSB |
SPI_OP_MODE_MASTER | SPI_MODE_CPOL | SPI_MODE_CPHA,
.frequency = 400000,
.slave = 0,
.cs = &adxl372_spi_cs,
};
struct spi_cs_control winbond1g_spi_cs =
{
.gpio = SPI_CS_GPIOS_DT_SPEC_GET(DT_NODELABEL(winbondflash)),
.delay = 0,
};
static const struct spi_config winbond1g_spi3_cfg =
{
.operation = SPI_WORD_SET(8) | SPI_TRANSFER_MSB |
SPI_OP_MODE_MASTER | SPI_MODE_CPOL | SPI_MODE_CPHA,
.frequency = 400000,
.slave = 0,
.cs = &winbond1g_spi_cs,
};
static const struct device *spi3_dev;
uint8_t init_spi3(void)
{
int err;
spi3_dev = DEVICE_DT_GET(DT_NODELABEL(spi3));
if (spi3_dev == NULL)
{
printk("Could not get %s device\n", spi3_dev->name);
return 1;
}
printk("SPI Device: %s\n", spi3_dev->name);
return 0;
}
int adxl372_id(void)
{
static uint8_t tx_buffer[2];
static uint8_t rx_buffer[2];
const struct spi_buf tx_buf =
{
.buf = tx_buffer,
.len = sizeof(tx_buffer)
};
const struct spi_buf_set tx =
{
.buffers = &tx_buf,
.count = 1
};
struct spi_buf rx_buf =
{
.buf = rx_buffer,
.len = sizeof(rx_buffer),
};
const struct spi_buf_set rx =
{
.buffers = &rx_buf,
.count = 1
};
// last byte of rx contains the response from the accelerometer
// Shift the register's address to the left by one, inorder to
// clear bit 0, and set bit 0 high per the adxl372 data sheet's
// specification for the read command structure of the device's SPI Protocal.
tx_buffer[0] = (0x02 << 1) + 1;
int error = spi_transceive(spi3_dev, &adxl372_spi3_cfg, &tx, &rx);
if (error != 0)
{
printk("SPI transceive error: %i\n", error);
return error;
}
if(rx_buffer[1] == 0xfa)
{
printk("Successfull ACC communication\n");
}
else
{
printk("Faild ACC communication\n");
printk("SPI Tx bytes: ");
for (int i = 0; i < sizeof(tx_buffer); i++)
{
printk("%x ", tx_buffer[i]);
}
printk(" SPI Rx bytes: ");
for (int i = 0; i < sizeof(rx_buffer); i++)
{
printk("%x ", rx_buffer[i]);
}
printk("\n");
}
return 0;
}
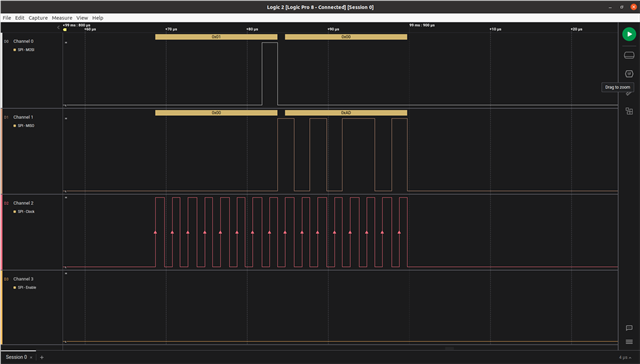
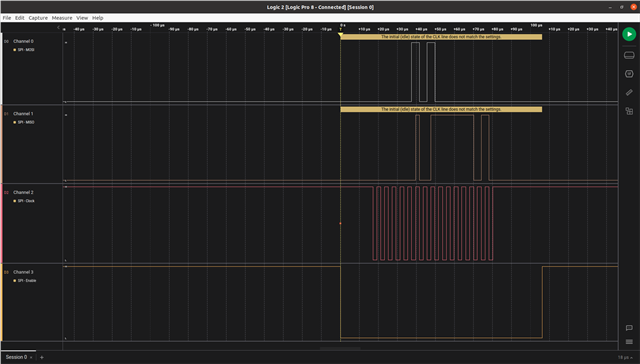
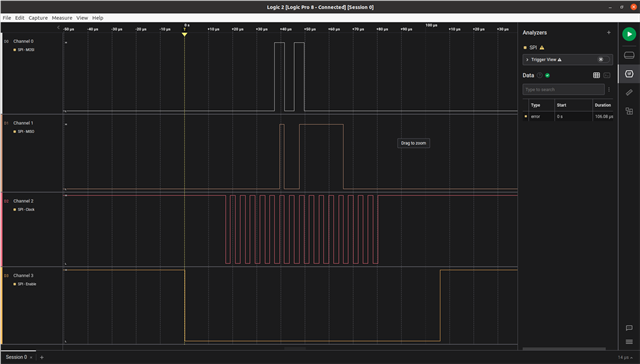
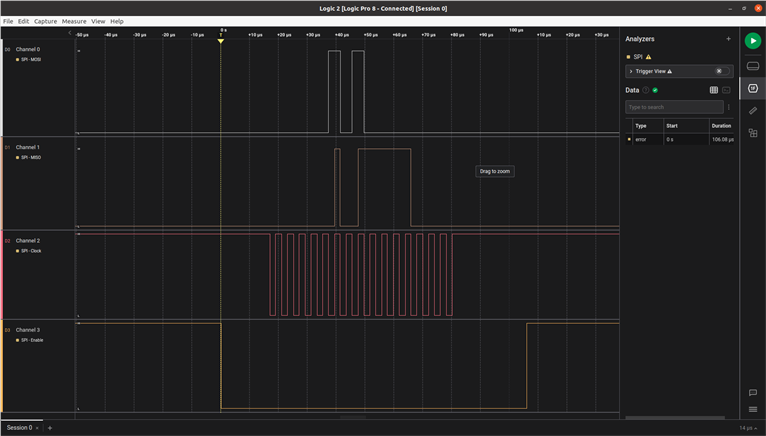
This is a screen shot of the adxl372_id function in action (
How do I configure the GPIO pins I'm using for SCLK and MOSI to be NRF_GPIO_PIN_H0H1 ? Should I do that GPIO configuration in my Overlay file and how would I do that?
Why is my clock line normally high ?
Greatly appreciate any help and advice. Thank you.