
Hi Nordic team,
I'm using S132 with nRF52832 on my custom board. The SDK is nRF5_SDK_17.1.0_ddde560
I have made a custom BLE service that worked for several months. Now I want to add a new characteristic to my custom service. I know what to do in firmware as the new characteristic is 99% similar to the existing custom characteristic inside the custom service.
Firstly, my custom board crashed as expected because I didn't reconfigure the RAM space and
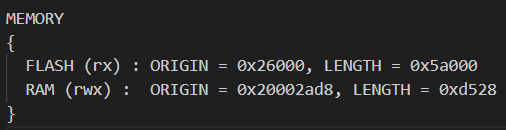
NRF_SDH_BLE_GATT_MAX_MTU_SIZE in sdk_config. Therefore, I tested this firmware on DK to get the debug message (I currently don't have the hardware to debug the custom board so all debug tasks are on the DK). Initially, here are the RAM configurations on DK.
The original NRF_SDH_BLE_GATT_MAX_MTU_SIZE value is 1408. Based on the Segger IDE suggestion, I changed the RAM_START to 0x20002D30. I keep the NRF_SDH_BLE_GATT_MAX_MTU_SIZE unchanged. The firmware works on the DK. I can see the new characteristic on my custom service. So that's good!
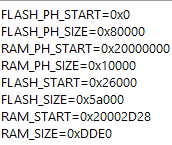
However, weird things started when I uploaded the same firmware on the custom board. The original RAM configurations of custom board are
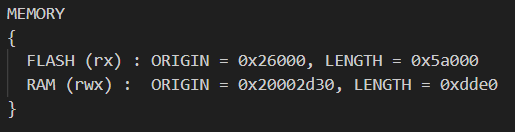
I know the original RAM configuration between DK and custom board are not the same but since they worked fine in the past, I didn't bother to match them together. But today, after I changed the RAM configuration on custom board to be the same as DK's configuration , the board crashes. Below is the custom board RAM configuration after the change
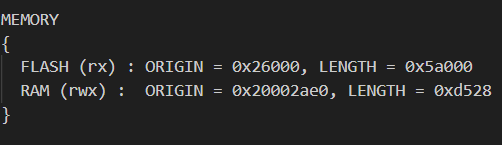
I thought it's probably the RAM change causing the crash. So instead of matching the RAM configuration of 2 boards, I increase the original RAM location up by 8 (0x20002D30 - 0x20002D28), similar to what I did on the DK. However, the board still crashes.
I tried changing the
NRF_SDH_BLE_GATTS_ATTR_TAB_SIZE to 1460. It still crashes.
I removed the BLE code in my firmware, it doesn't crash.
I added the BLE code back, but this time removed my new characteristic. It doesn't crash.
So that means my custom board is lacked of RAM to add the new characteristic and the amount of extra RAM required is not the same with the DK. Therefore, can you please give me a suggestion of what kind of RAM value I should change it to on the custom board? I program the DK with Segger IDE but program the custom board with GCC
Thank you for your help and suggestion.
Best regards,
Xander



