Dear team,
I am trying to test Wi-Fi scan sample with the kits nRF9160DK and nRF7002DK. I am aware of nRF7002-EK and it is taking time to get it. Since we are running out of time, we are trying to accomplish the same using previously said two DKs.
In the hardware,
I saw the ticket nRF9160 and nRF7002 Wi-Fi controller connection and made the following connections.
| Board | nRF9160-DK(P3 & P4) | nRF7002-DK (P24) |
| SPI CLK | P0.13 | P0.17 |
| SPI CS | P0.10 | P0.18 |
| SPI MOSI | P0.11 | P0.13 |
| SPI MISO | P0.12 | P0.14 |
| HOST-IRQ | P0.07 | P0.23 |
| IOVDD-CTR | P0.00 | P0.31 |
| BUCKEN | P0.01 | P0.12 |
Also I soldered the SBs from SB20 to SB25 on nRF7002DK.
I DID NOT remove the 0R Resistors R26-R31.
I powered both DKs seperately using USB cables.
Now, the firmware part.
I programmed nRF5340 on nRF7002 DK with basic blinky, to make sure it is not using any other GPIOs, that we are using.
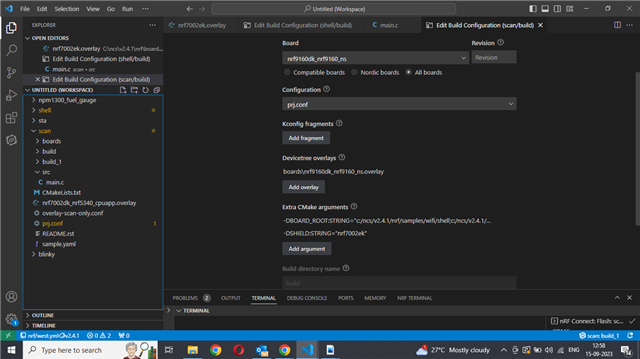
Now, I opened the Wi-Fi Scan sample in VS Code.
Toolchain used is v2.4.1.
I added the overlay-scan-only.conf, nrf9160dk_nrf9160_ns.overlay under boards.
I added -DSHIELD:STRING="nrf7002ek" and -DOVERLAY_CONFIG=overlay-scan-only.conf under CMake arguments in build configuration.
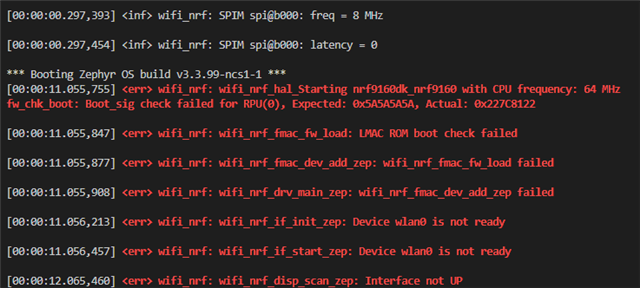
Build is successful, but when programmed, no UART output is seen.
Please help.
Thanks a ton in advance.