I am working through the Nordic Developer Academy and got stuck at lesson 4 (UART receive)
In particular, I am confused about this part:
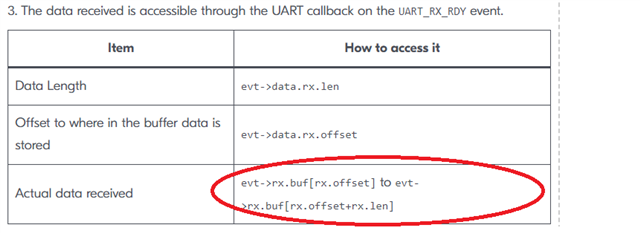
I have created a sample project and connected external CP2102 USB->Serial adapter to P0.06 and P0.08 pins.
The code that I use:
/*
* Copyright (c) 2012-2014 Wind River Systems, Inc.
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/drivers/gpio.h>
#include "stdio.h"
#include "zephyr/drivers/uart.h"
const struct device *uart = DEVICE_DT_GET(DT_NODELABEL(uart0));
static uint8_t tx_buf[] = {"nRF Connect SDK Fundamentals Course \n\r"};
static uint8_t rx_buf[10] = {0}; //A buffer to store incoming UART data
const struct uart_config uart_cfg = {
.baudrate = 115200,
.parity = UART_CFG_PARITY_NONE,
.stop_bits = UART_CFG_STOP_BITS_1,
.data_bits = UART_CFG_DATA_BITS_8,
.flow_ctrl = UART_CFG_FLOW_CTRL_NONE
};
static void uart_cb(const struct device *dev, struct uart_event *evt, void *user_data)
{
switch (evt->type) {
case UART_TX_DONE:
printf("transmission complete \n");
break;
case UART_TX_ABORTED:
// do something
break;
case UART_RX_RDY:
printf("rx rdy \n");
if((evt->data.rx.len) != 0){
printf("data received = %s \n", evt->data.rx.buf[evt->data.rx.offset]);
}
break;
case UART_RX_BUF_REQUEST:
printf("requesting buffer \n");
// do something
break;
case UART_RX_BUF_RELEASED:
printf("buffer released \n");
// do something
break;
case UART_RX_DISABLED:
printf("rx disabled \n");
uart_rx_enable(dev, rx_buf, sizeof(rx_buf), 100);
break;
case UART_RX_STOPPED:
// do something
break;
default:
break;
}
}
int main(void)
{
if (!device_is_ready(uart)) {
return;
}
int err;
err = uart_callback_set(uart, uart_cb, NULL);
if (err) {
return err;
}
uart_rx_enable(uart, rx_buf, sizeof(rx_buf), 100);
err = uart_tx(uart, tx_buf, sizeof(tx_buf), SYS_FOREVER_US);
if (err) {
return err;
}
while(1){
k_msleep(1000);
}
return 0;
}
I am having issues understanding how to properly print out all the received data:
I tried to do:
case UART_RX_RDY:
printf("rx rdy \n");
if((evt->data.rx.len) != 0){
printf("data received = %s \n", evt->data.rx.buf[evt->data.rx.offset]);
}
break;
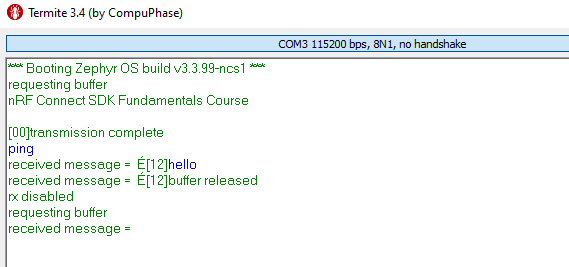
but when I send the data via UART (using Termite) , the following is printed:
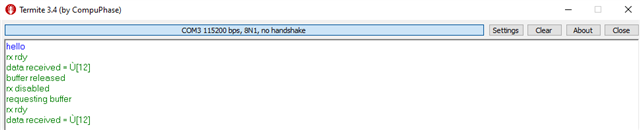
I would appreciate if someone could clarify how to correctly print out all the received data. Thanks in advance
Just for testing, I have also tried to print:
case UART_RX_RDY:
printf("rx rdy \n");
printf("data: %s \n", rx_buf);
break;
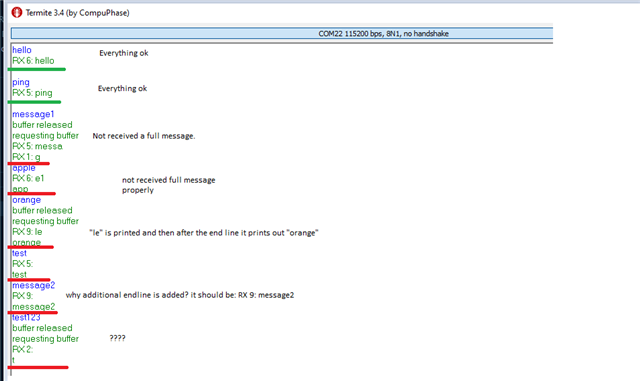
and the logs are as following: (captured using Termite):
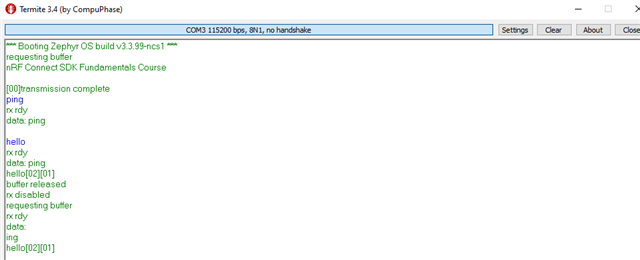
As you can see, it receives the first message (ping) correctly, but after that, the buffer overflows (rx_buf is 10 bytes size) and then it cannot print out the data correctly)