Hello,
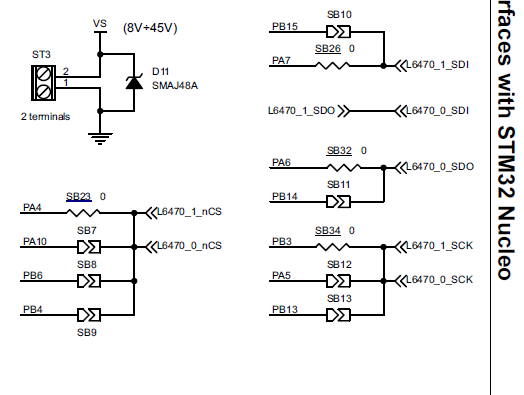
I have experience with Nordic devices but I am new to using Zephyr and nRF Connect SDK. I am trying to use the ST stepper driver chip L6470 with the nRF52832 and Zephyr. I did find the following code on github which appears to be for the ST L6470 for Zephyr.
https://github.com/yashi/st-l6470
When I run the code, I am just trying to get the status from the L6470 driver.
int status_response = l64x0_get_status(dev);
printk("L6470 status 0x%0xX\n", status_response);
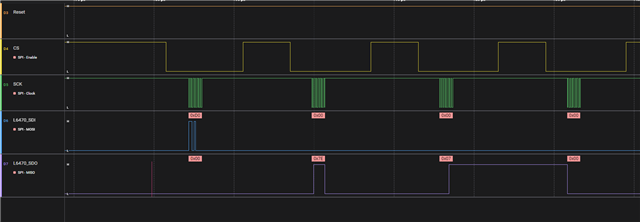
If a status messages is sent to the L6470, the device should send a response back of 0x7E07. On a different design, I have a STM32F4 communicating with a L6470, When the STM32F4 issues the status request, the L6470 responds with 0x7E07.
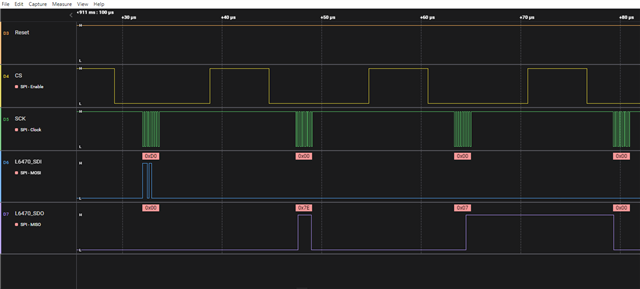
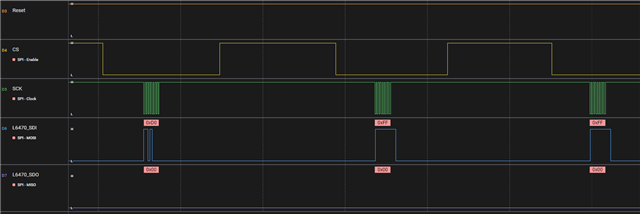
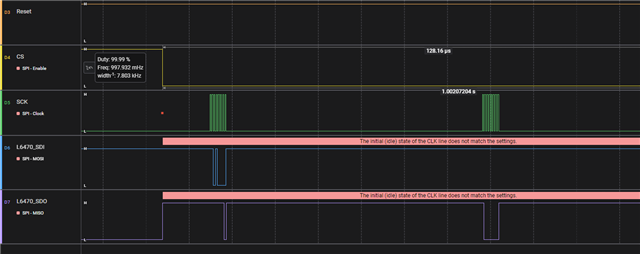
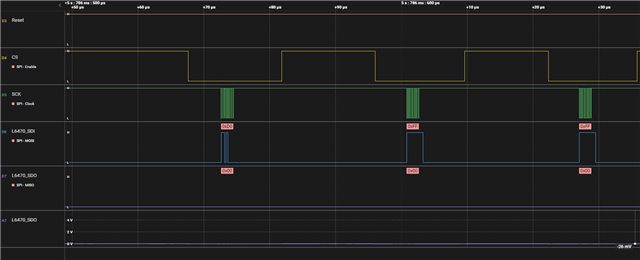
When I am using the code on the nRF52832 trying to get the status from the L6470, I don't see anything on the SDO back from the device when the device sending in the clock pulses.
I am hoping anyone might have some suggestions.
I did modify the code somewhat so I could use some other SPI code that I found. With code, I did see some form of communication back on the SDO line but it was incorrect. So I believe I have the board hooked up correct but I am not sure what I have wrong.
Attached is the modified code. You can use the #define of L6470_CODE to try the one way or the #MY_CODE for the other.
/*
* Copyright (c) 2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/logging/log.h>
LOG_MODULE_REGISTER(app, LOG_LEVEL_DBG);
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/sys/util.h>
#include <stdlib.h>
#include <zephyr/drivers/spi.h>
#include "l6470.h"
#define MOTOR_DRIVER DT_NODELABEL(motor_driver)
//#define MOTOR_DRIVER DT_NODELABEL(l6470)
/* 1000 msec = 1 sec */
#define SLEEP_TIME_MS 1000
/* The devicetree node identifier for the "led0" alias. */
#define LED0_NODE DT_ALIAS(led0)
#define L6470_CODE (0)
#define MY_CODE (1)
#define MY_GPIO0 DT_NODELABEL(gpio0)
#define GPIO_0_CS 11
const struct device *gpio0_dev = DEVICE_DT_GET(MY_GPIO0);
#define GPIO_11_NRESET_L6470 18
const struct device *const dev = DEVICE_DT_GET(MOTOR_DRIVER);
#if MY_CODE
#define SPI1_NODE DT_NODELABEL(spi1)
static const struct device *spi1_dev = DEVICE_DT_GET(SPI1_NODE);
#endif
/*
* A build error on this line means your board is unsupported.
* See the sample documentation for information on how to fix this.
*/
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);
static struct spi_config spi_cfg =
{
.frequency = 2000000,
.operation = SPI_WORD_SET(8),
.slave = 0,
};
#if MY_CODE
static void readRegister(uint8_t reg, uint8_t values[], uint8_t size)
{
int err;
uint8_t tx_buffer[1];
tx_buffer[0] = reg;
struct spi_buf tx_spi_bufs[] =
{
{
.buf = tx_buffer,
.len = sizeof(tx_buffer),
}
};
struct spi_buf_set spi_tx_buffer_set =
{
.buffers = tx_spi_bufs,
.count = 1
};
struct spi_buf rx_spi_bufs[] =
{
{
.buf = values,
.len = size,
}
};
struct spi_buf_set spi_rx_buffer_set =
{
.buffers = rx_spi_bufs,
.count = 1
};
gpio_pin_set(gpio0_dev, GPIO_0_CS,0);
do
{
err = spi_write(spi1_dev, &spi_cfg, &spi_tx_buffer_set);
if(err < 0)
{
break;
}
err = spi_read(spi1_dev,&spi_cfg, &spi_rx_buffer_set);
} while (false);
gpio_pin_set(gpio0_dev, GPIO_0_CS, 1);
if(err < 0)
{
printk("Read registers failed: %d \n", err);
}
}
static void readStatusReg(void)
{
uint8_t rx_buf_status[2];
uint16_t temp;
#define L6470_ADDR_STATUS (0xD0) //(0x19)
// CMD_GET_STATUS
readRegister(L6470_ADDR_STATUS, rx_buf_status, 1);
//readRegister(CMD_GET_STATUS, rx_buf_status, 2);
temp = (uint16_t) rx_buf_status[1] << 8;
temp |= (uint16_t) rx_buf_status[0];
printk("L6470 status 0x%0xX\n", temp);
}
#endif
static void debug_print(const struct device *const dev, int count)
{
uint16_t adc_out = l64x0_getparam_adc_out(dev);
uint32_t speed = l64x0_getparam_speed(dev);
uint32_t status = l64x0_get_status(dev);
printk("%d: Speed: %u (0x%x), Status: 0x%x (%s%s%s%s%s%s%s%s%s%s%s%s%s), ADC_OUT %x\n",
count,
speed, speed, status,
(status & L6470_STATUS_SCK_MOD) ? "SCK_MOD " : "",
(status & L6470_STATUS_STEP_LOSS_B) ? "" : "STEP_LOSS_B ",
(status & L6470_STATUS_STEP_LOSS_A) ? "" : "STEP_LOSS_A ",
(status & L6470_STATUS_OCD) ? "" : "OCD ",
(status & L6470_STATUS_TH_SD) ? "" : "TH_SD ",
(status & L6470_STATUS_TH_WRN) ? "" : "TH_WRN ",
(status & L6470_STATUS_UVLO) ? "" : "UVLO ",
(status & L6470_STATUS_WRONG_CMD) ? "WRONG_CMD " : "",
(status & L6470_STATUS_NOTPERF_CMD) ? "NOTPERF_CMD " : "",
(status & L6470_STATUS_DIR) ? "DIR_f " : "DIR_r ",
(status & L6470_STATUS_SW_EVN) ? "SW_EVN " : "",
(status & L6470_STATUS_BUSY) ? "" : "BUSY ",
(status & L6470_STATUS_HiZ) ? "HiZ" : "",
adc_out);
}
void main(void)
{
int ret;
if (!device_is_ready(led.port)) {
return;
}
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
if (ret < 0) {
return;
}
#if MY_CODE
gpio_pin_configure(gpio0_dev, GPIO_0_CS, GPIO_OUTPUT);
gpio_pin_set(gpio0_dev, GPIO_0_CS, 1);
#endif
#if L6470_CODE
if (!device_is_ready(dev)) {
printk("%s: device not ready.\n", dev->name);
return;
}
const struct gpio_dt_spec n_stby =
GPIO_DT_SPEC_GET(DT_NODELABEL(motor_driver), stby_gpios);
if (!device_is_ready(n_stby.port)) {
printk("%s: device not ready.\n", dev->name);
return;
}
gpio_pin_configure_dt(&n_stby, GPIO_OUTPUT_ACTIVE);
k_usleep(10);
gpio_pin_set_dt(&n_stby, 0);
k_sleep(K_MSEC(1));
l64x0_nop(dev);
l64x0_nop(dev);
l64x0_nop(dev);
l64x0_nop(dev);
l64x0_reset_device(dev);
k_usleep(500);
debug_print(dev, -1);
/* K_VAL = (K_VAL_X + BEMF_COMP) * VSCOMP * K_THERM) * microstep */
/* No compensation is active */
/** The K_VALs */
l64x0_setparam_kval_hold(dev, L64X0_KVAL_X_256TH(22));
l64x0_setparam_kval_acc(dev, L64X0_KVAL_X_256TH(22));
l64x0_setparam_kval_dec(dev, L64X0_KVAL_X_256TH(22));
l64x0_setparam_kval_run(dev, L64X0_KVAL_X_256TH(22));
#endif
#if MY_CODE
if(!device_is_ready(spi1_dev))
{
printk("spi1_dev is not ready\n");
return;
}
#endif
while (1)
{
ret = gpio_pin_toggle_dt(&led);
if (ret < 0)
{
return;
}
k_msleep(SLEEP_TIME_MS);
#if MY_CODE
readStatusReg();
#endif
#if L6470_CODE
//gpio_pin_set(gpio0_dev, GPIO_0_CS,0);
int status_response = l64x0_get_status(dev);
printk("L6470 status 0x%0xX\n", status_response);
//gpio_pin_set(gpio0_dev, GPIO_0_CS, 1);
#endif
}
}
Any assistance is helpful.
Thanks.


 Thanks for the response.
Thanks for the response.