Hello community,
I am trying for multiple firmware updates for my NRF5340 DK board.
What I am doing is I have build and flashed the SMP server sample program found /zephyr/samples/subsys/mgmt/mcumgr/smp_svr
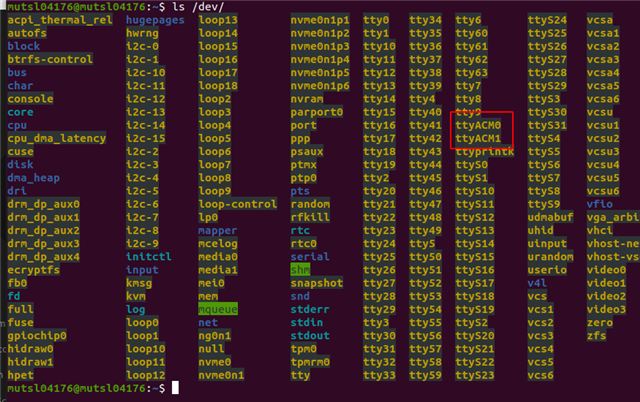
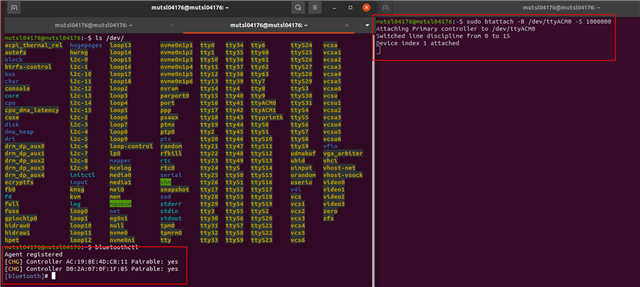
After flashing this application, I can see my board recognised as a ttyACM0 device while I perform ls /dev.
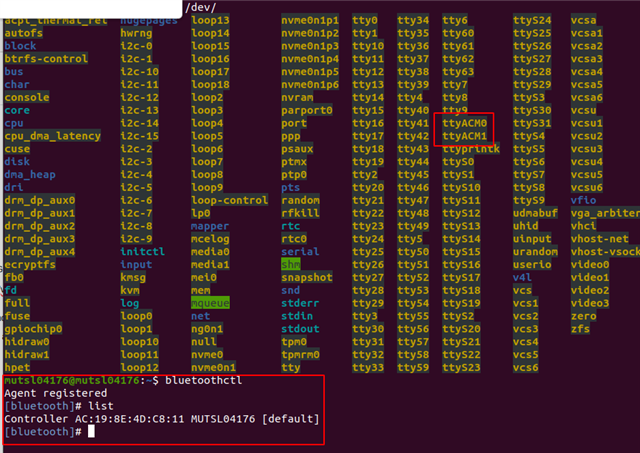
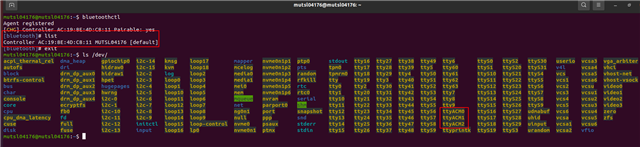
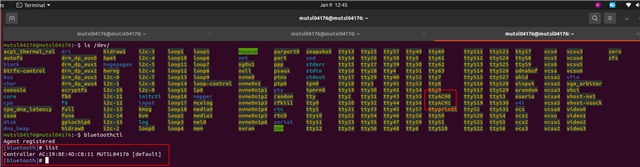
Using the mcumgr tool I am also able to flash the Bluetooth HCI_USB sample program and after confirming the image and resetting the board, the board now acts as a bluetooth controller. I can verify this using the bluetoothctl command.
Now If I want to do a firmware upgrade, I dont have any way in the HCI_USB application to go back to smp server application. How can I perform multiple firmware updates using mcumgr?
Can virtual com port concept be useful here? If yes then I would like to have a detailed tutorial for this .