Hello,
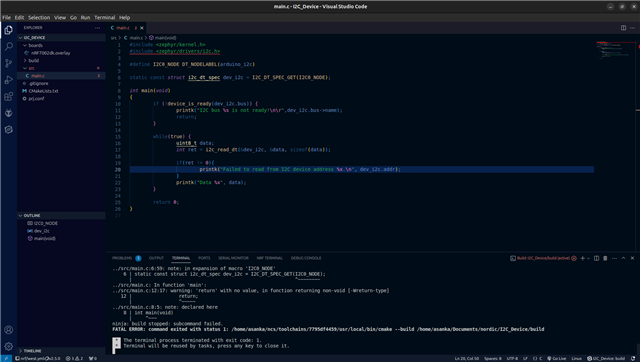
I wrote a sample code to read 8bits from an I2C device as below.
#include <zephyr/kernel.h>
#include <zephyr/drivers/i2c.h>
#define I2C0_NODE DT_NODELABEL(arduino_i2c)
static const struct i2c_dt_spec dev_i2c = I2C_DT_SPEC_GET(I2C0_NODE);
int main(void)
{
if (!device_is_ready(dev_i2c.bus)) {
printk("I2C bus %s is not ready!\n\r",dev_i2c.bus->name);
return;
}
while(true) {
uint8_t data;
int ret = i2c_read_dt(&dev_i2c, &data, sizeof(data));
if(ret != 0){
printk("Failed to read from I2C device address %x.\n", dev_i2c.addr);
}
printk("Data %x", data);
}
return 0;
}
But I get the following error when I try to compile.
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/device.h:85:41: error: '__device_dts_ord_DT_N_S_soc_S_peripheral_40000000_S_i2c_9000_BUS_ORD' undeclared here (not in a function); did you mean 'DT_N_S_soc_S_peripheral_40000000_S_i2c_9000_ORD'?
85 | #define DEVICE_NAME_GET(dev_id) _CONCAT(__device_, dev_id)
| ^~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_internal.h:72:26: note: in definition of macro '__DEBRACKET'
72 | #define __DEBRACKET(...) __VA_ARGS__
| ^~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_internal.h:64:9: note: in expansion of macro '__GET_ARG2_DEBRACKET'
64 | __GET_ARG2_DEBRACKET(one_or_two_args _if_code, _else_code)
| ^~~~~~~~~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_internal.h:59:9: note: in expansion of macro '__COND_CODE'
59 | __COND_CODE(_XXXX##_flag, _if_1_code, _else_code)
| ^~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_macro.h:180:9: note: in expansion of macro 'Z_COND_CODE_1'
180 | Z_COND_CODE_1(_flag, _if_1_code, _else_code)
| ^~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/drivers/i2c.h:120:17: note: in expansion of macro 'COND_CODE_1'
120 | COND_CODE_1(DT_ON_BUS(node_id, i3c), \
| ^~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/toolchain/common.h:133:23: note: in expansion of macro '_DO_CONCAT'
133 | #define _CONCAT(x, y) _DO_CONCAT(x, y)
| ^~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/device.h:85:33: note: in expansion of macro '_CONCAT'
85 | #define DEVICE_NAME_GET(dev_id) _CONCAT(__device_, dev_id)
| ^~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/device.h:211:37: note: in expansion of macro 'DEVICE_NAME_GET'
211 | #define DEVICE_DT_NAME_GET(node_id) DEVICE_NAME_GET(Z_DEVICE_DT_DEV_ID(node_id))
| ^~~~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/device.h:228:34: note: in expansion of macro 'DEVICE_DT_NAME_GET'
228 | #define DEVICE_DT_GET(node_id) (&DEVICE_DT_NAME_GET(node_id))
| ^~~~~~~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/drivers/i2c.h:105:16: note: in expansion of macro 'DEVICE_DT_GET'
105 | .bus = DEVICE_DT_GET(DT_BUS(node_id)), \
| ^~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/drivers/i2c.h:122:30: note: in expansion of macro 'I2C_DT_SPEC_GET_ON_I2C'
122 | (I2C_DT_SPEC_GET_ON_I2C(node_id))) \
| ^~~~~~~~~~~~~~~~~~~~~~
../src/main.c:6:43: note: in expansion of macro 'I2C_DT_SPEC_GET'
6 | static const struct i2c_dt_spec dev_i2c = I2C_DT_SPEC_GET(I2C0_NODE);
| ^~~~~~~~~~~~~~~
zephyr/include/generated/devicetree_generated.h:7924:75: warning: unsigned conversion from 'int' to 'short unsigned int' changes value from '1073778688' to '36864' [-Woverflow]
7924 | #define DT_N_S_soc_S_peripheral_40000000_S_i2c_9000_REG_IDX_0_VAL_ADDRESS 1073778688 /* 0x40009000 */
| ^~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_internal.h:72:26: note: in definition of macro '__DEBRACKET'
72 | #define __DEBRACKET(...) __VA_ARGS__
| ^~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_internal.h:64:9: note: in expansion of macro '__GET_ARG2_DEBRACKET'
64 | __GET_ARG2_DEBRACKET(one_or_two_args _if_code, _else_code)
| ^~~~~~~~~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_internal.h:59:9: note: in expansion of macro '__COND_CODE'
59 | __COND_CODE(_XXXX##_flag, _if_1_code, _else_code)
| ^~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/sys/util_macro.h:180:9: note: in expansion of macro 'Z_COND_CODE_1'
180 | Z_COND_CODE_1(_flag, _if_1_code, _else_code)
| ^~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/drivers/i2c.h:120:17: note: in expansion of macro 'COND_CODE_1'
120 | COND_CODE_1(DT_ON_BUS(node_id, i3c), \
| ^~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/devicetree.h:4233:33: note: in expansion of macro 'DT_N_S_soc_S_peripheral_40000000_S_i2c_9000_REG_IDX_0_VAL_ADDRESS'
4233 | #define DT_CAT4(a1, a2, a3, a4) a1 ## a2 ## a3 ## a4
| ^~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/devicetree.h:2201:9: note: in expansion of macro 'DT_CAT4'
2201 | DT_CAT4(node_id, _REG_IDX_, idx, _VAL_ADDRESS)
| ^~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/devicetree.h:2224:30: note: in expansion of macro 'DT_REG_ADDR_BY_IDX'
2224 | #define DT_REG_ADDR(node_id) DT_REG_ADDR_BY_IDX(node_id, 0)
| ^~~~~~~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/drivers/i2c.h:106:17: note: in expansion of macro 'DT_REG_ADDR'
106 | .addr = DT_REG_ADDR(node_id)
| ^~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/drivers/i2c.h:122:30: note: in expansion of macro 'I2C_DT_SPEC_GET_ON_I2C'
122 | (I2C_DT_SPEC_GET_ON_I2C(node_id))) \
| ^~~~~~~~~~~~~~~~~~~~~~
../src/main.c:6:43: note: in expansion of macro 'I2C_DT_SPEC_GET'
6 | static const struct i2c_dt_spec dev_i2c = I2C_DT_SPEC_GET(I2C0_NODE);
| ^~~~~~~~~~~~~~~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/devicetree.h:4229:24: note: in expansion of macro 'DT_N_NODELABEL_arduino_i2c'
4229 | #define DT_CAT(a1, a2) a1 ## a2
| ^~
/home/asanka/ncs/v2.5.0/zephyr/include/zephyr/devicetree.h:197:29: note: in expansion of macro 'DT_CAT'
197 | #define DT_NODELABEL(label) DT_CAT(DT_N_NODELABEL_, label)
| ^~~~~~
../src/main.c:4:19: note: in expansion of macro 'DT_NODELABEL'
4 | #define I2C0_NODE DT_NODELABEL(arduino_i2c)
| ^~~~~~~~~~~~
../src/main.c:6:59: note: in expansion of macro 'I2C0_NODE'
6 | static const struct i2c_dt_spec dev_i2c = I2C_DT_SPEC_GET(I2C0_NODE);
| ^~~~~~~~~
../src/main.c: In function 'main':
../src/main.c:12:17: warning: 'return' with no value, in function returning non-void [-Wreturn-type]
12 | return;
| ^~~~~~
../src/main.c:8:5: note: declared here
8 | int main(void)
| ^~~~
I'm quite new to this platform and I appreciate any help with this. Thank you.