Hello,
nRF52840
ncs-v2.5.0-rc2
I am using a GPIO interrupt to trigger a callback on every edge on a particular GPIO. I am then timing the difference in time between interrupts in order to make calculations, such as decoding FSK and Manchester data. I got this to work really well but I was using the RTTviewer as my terminal. As soon as I disconnect the RTT terminal my algorithm stops working. I have discovered that the FSK data that I am getting is very well defined when the RTTviewer is attached. That is, there are very distinct frequencies. When I disconnect RTT the frequencies are much less defined and it becomes impossible to recover data from them.
Any reason why attaching RTTviewer would change the behavior of the interrupt? Timer? execution speed? thread handling (not that I even have extra threads..)?
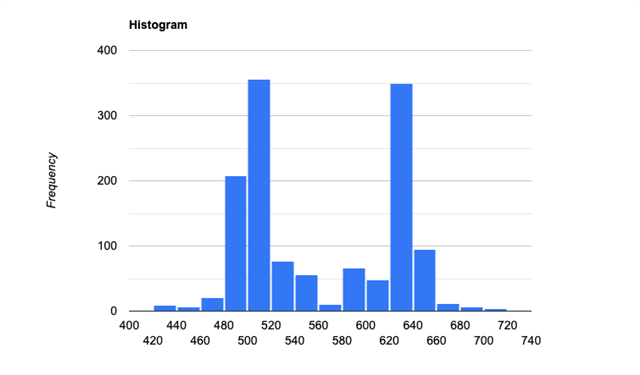
I have attached two histograms, showing time_diffs between interrupts with RTTviewer both attached and unattached.
(psuedo code snippet)
void gpio_cb()
{
this_time = get_time()
time_diff = this_time - last_time // time_diff used later to make calculations and decide which frequency the FSK is operating at. WORKS WHEN RTTviewer IS ATTACHED!
last_time = this_time
...
//other calculations are made
//works GREAT when RTTviewer is attached
...
}
Histogram of "time_diff" values without RTTviewer
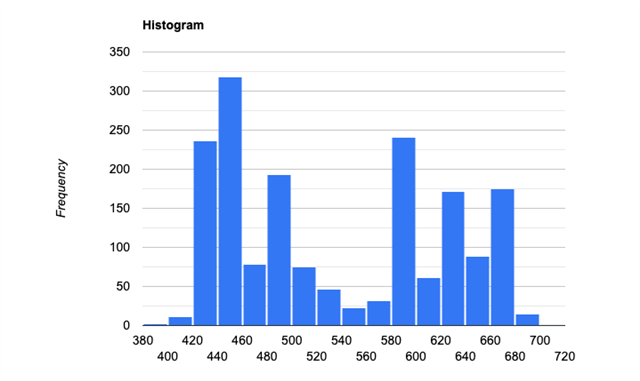
Histogram of "time_diff" values with RTTviewer (literally just clicked connect->select correct options and MCU->okay, without even restarting it)
Thanks,
Nathan