Hi supporter
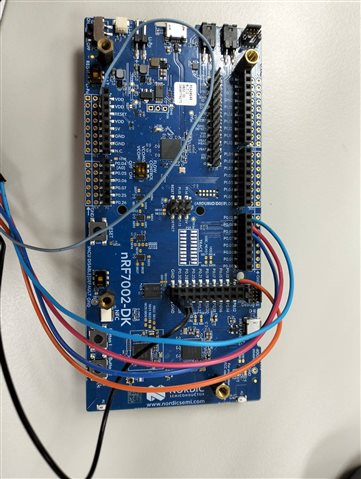
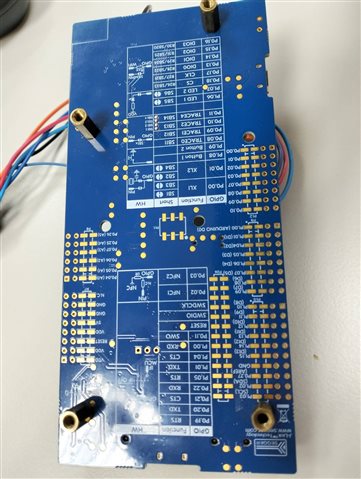
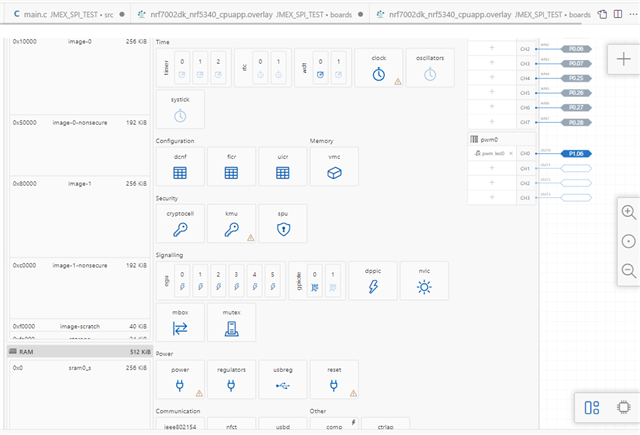
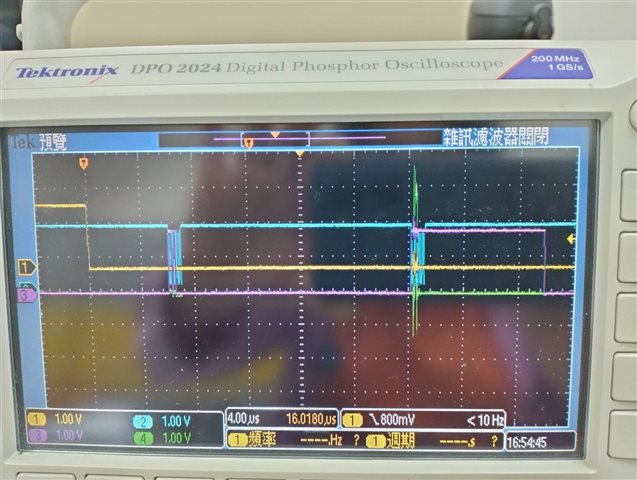
I use the sample "interfacing with a sensor over SPI"(academy.nordicsemi.com/.../), modified as BMP280 and ST-lis2hh12 sensor.I use vscode build environment, board:nRF7002_DK, SDK:v2.5.2.For SPI resource I use spi4 (CS:P0.11, SCK:P0.08, MOSI:P0.09, MISO:P0.10) , For this spi4 resource I short (SB11-SB14)on nRF7002_DK board to release the spi4 resource for my sensor.All setting and modify as academy's web side, all harware connection is solid, but the read and write registers on sensor result is "ZERO", when read and write registers no any error message.what did I miss for setting?Below is for read write result for BMP280 and ST-lis2hh12 value.please give suggestion for this issue, Thanks.
FOR BMP280 read write result
00:00:00.253,509] <inf> Lesson5_Exercise1: -------------------------------------------------------------
[00:00:00.253,509] <inf> Lesson5_Exercise1: bmp_read_calibrationdata: Reading from calibration registers:
[00:00:00.253,601] <inf> Lesson5_Exercise1: Reg[0x88] 2 Bytes read: Param T1 = 0
[00:00:00.303,771] <inf> Lesson5_Exercise1: Reg[0x8a] 2 Bytes read: Param T2 = 0
[00:00:00.353,912] <inf> Lesson5_Exercise1: Reg[0x8c] 2 Bytes read: Param T3 = 0
[00:00:00.404,083] <inf> Lesson5_Exercise1: Reg[0x8e] 2 Bytes read: Param P1 = 0
[00:00:00.454,254] <inf> Lesson5_Exercise1: Reg[0x90] 2 Bytes read: Param P2 = 0
[00:00:00.504,425] <inf> Lesson5_Exercise1: Reg[0x92] 2 Bytes read: Param P3 = 0
[00:00:00.554,626] <inf> Lesson5_Exercise1: Reg[0x94] 2 Bytes read: Param P4 = 0
[00:00:00.604,766] <inf> Lesson5_Exercise1: Reg[0x96] 2 Bytes read: Param P5 = 0
[00:00:00.654,937] <inf> Lesson5_Exercise1: Reg[0x98] 2 Bytes read: Param P6 = 0
[00:00:00.705,108] <inf> Lesson5_Exercise1: Reg[0x9a] 2 Bytes read: Param P7 = 0
[00:00:00.755,279] <inf> Lesson5_Exercise1: Reg[0x9c] 2 Bytes read: Param P8 = 0
[00:00:00.805,480] <inf> Lesson5_Exercise1: Reg[0x9e] 2 Bytes read: Param P9 = 0
[00:00:00.855,590] <inf> Lesson5_Exercise1: bmp_print_registers: Reading all BMP280 registers (one by one)
[00:00:00.855,651] <inf> Lesson5_Exercise1: Reg[0xd0] = 0x00
[00:00:00.875,823] <inf> Lesson5_Exercise1: Reg[0xa1] = 0x00
[00:00:00.895,965] <inf> Lesson5_Exercise1: Reg[0xa2] = 0x00
[00:00:00.916,107] <inf> Lesson5_Exercise1: Reg[0xa3] = 0x00
[00:00:00.936,248] <inf> Lesson5_Exercise1: Reg[0xa4] = 0x00
[00:00:00.956,390] <inf> Lesson5_Exercise1: Reg[0xa5] = 0x00
[00:00:00.976,531] <inf> Lesson5_Exercise1: Reg[0xa6] = 0x00
[00:00:00.996,673] <inf> Lesson5_Exercise1: Reg[0xa7] = 0x00
[00:00:01.016,845] <inf> Lesson5_Exercise1: Reg[0xa8] = 0x00
[00:00:01.036,987] <inf> Lesson5_Exercise1: Reg[0xa9] = 0x00
[00:00:01.057,128] <inf> Lesson5_Exercise1: Reg[0xaa] = 0x00
[00:00:01.077,270] <inf> Lesson5_Exercise1: Reg[0xab] = 0x00
[00:00:01.097,412] <inf> Lesson5_Exercise1: Reg[0xac] = 0x00
[00:00:01.117,553] <inf> Lesson5_Exercise1: Reg[0xad] = 0x00
[00:00:01.137,695] <inf> Lesson5_Exercise1: Reg[0xae] = 0x00
[00:00:01.157,836] <inf> Lesson5_Exercise1: Reg[0xaf] = 0x00
[00:00:01.177,978] <inf> Lesson5_Exercise1: Reg[0xb0] = 0x00
[00:00:01.198,120] <inf> Lesson5_Exercise1: Reg[0xf4] = 0x00
[00:00:01.218,292] <inf> Lesson5_Exercise1: Reg[0xf5] = 0x00
[00:00:01.238,433] <inf> Lesson5_Exercise1: Reg[0xf6] = 0x00
[00:00:01.258,575] <inf> Lesson5_Exercise1: Reg[0xf7] = 0x00
[00:00:01.278,717] <inf> Lesson5_Exercise1: Reg[0xf8] = 0x00
[00:00:01.298,858] <inf> Lesson5_Exercise1: Reg[0xf9] = 0x00
[00:00:01.319,000] <inf> Lesson5_Exercise1: Reg[0xfa] = 0x00
[00:00:01.339,141] <inf> Lesson5_Exercise1: Reg[0xfb] = 0x00
[00:00:01.359,283] <inf> Lesson5_Exercise1: Reg[0xfc] = 0x00
[00:00:01.379,425] <inf> Lesson5_Exercise1: Reg[0xfd] = 0x00
[00:00:01.399,566] <inf> Lesson5_Exercise1: Reg[0xfe] = 0x00
[00:00:01.419,738] <inf> Lesson5_Exercise1: Reg[0xff] = 0x00
[00:00:01.439,819] <inf> Lesson5_Exercise1: -------------------------------------------------------------
[00:00:01.439,849] <inf> Lesson5_Exercise1: Continuously read sensor samples, compensate, and display
[00:00:01.439,910] <inf> Lesson5_Exercise1: Temperature: uncomp = 0 C comp = 0.00 C
[00:00:01.439,941] <inf> Lesson5_Exercise1: Pressure: uncomp = 0 Pa comp = 0.00 Pa
[00:00:02.440,093] <inf> Lesson5_Exercise1: Temperature: uncomp = 0 C comp = 0.00 C
[00:00:02.440,093] <inf> Lesson5_Exercise1: Pressure: uncomp = 0 Pa comp = 0.00 Pa
[00:00:03.440,307] <inf> Lesson5_Exercise1: Temperature: uncomp = 0 C comp = 0.00 C
[00:00:03.440,307] <inf> Lesson5_Exercise1: Pressure: uncomp = 0 Pa comp = 0.00 Pa
[00:00:04.440,490] <inf> Lesson5_Exercise1: Temperature: uncomp = 0 C comp = 0.00 C
[00:00:04.440,490] <inf> Lesson5_Exercise1: Pressure: uncomp = 0 Pa comp = 0.00 Pa
[00:00:05.440,704] <inf> Lesson5_Exercise1: Temperature: uncomp = 0 C comp = 0.00 C
[00:00:05.440,704] <inf> Lesson5_Exercise1: Pressure: uncomp = 0 Pa comp = 0.00 Pa
FOR ST-lis2hh12 read write result
*** Booting nRF Connect SDK v2.5.2 ***
[00:00:00.250,366] <inf> Lesson5_Exercise1: -------------------------------------------------------------
[00:00:00.250,366] <inf> Lesson5_Exercise1: lis_read_calibrationdata: Reading from calibration registers:
[00:00:00.250,396] <inf> Lesson5_Exercise1: Reg[0x0b] 2 Bytes read: Param T1 = 0
[00:00:00.300,842] <inf> Lesson5_Exercise1: Reg[0x0f] = 0x00
[00:00:00.321,044] <inf> Lesson5_Exercise1: Reg[0x1e] = 0x00
[00:00:00.341,217] <inf> Lesson5_Exercise1: Reg[0x1f] = 0x00
[00:00:00.361,389] <inf> Lesson5_Exercise1: Reg[0x20] = 0x00
[00:00:00.381,591] <inf> Lesson5_Exercise1: Reg[0x21] = 0x00
[00:00:00.401,763] <inf> Lesson5_Exercise1: Reg[0x22] = 0x00
[00:00:00.421,936] <inf> Lesson5_Exercise1: Reg[0x23] = 0x00
[00:00:00.442,108] <inf> Lesson5_Exercise1: Reg[0x24] = 0x00
[00:00:00.462,310] <inf> Lesson5_Exercise1: Reg[0x25] = 0x00
[00:00:00.482,482] <inf> Lesson5_Exercise1: Reg[0x26] = 0x00
[00:00:00.502,655] <inf> Lesson5_Exercise1: Reg[0x27] = 0x00
[00:00:00.522,827] <inf> Lesson5_Exercise1: Reg[0x28] = 0x00
[00:00:00.543,029] <inf> Lesson5_Exercise1: Reg[0x26] = 0x00
[00:00:00.563,201] <inf> Lesson5_Exercise1: Reg[0x27] = 0x00
[00:00:00.583,404] <inf> Lesson5_Exercise1: Reg[0x28] = 0x00
[00:00:00.603,546] <inf> Lesson5_Exercise1: Reg[0x29] = 0x00
[00:00:00.623,748] <inf> Lesson5_Exercise1: Reg[0x2a] = 0x00
[00:00:00.643,920] <inf> Lesson5_Exercise1: Reg[0x2b] = 0x00
[00:00:00.664,093] <inf> Lesson5_Exercise1: Reg[0x2c] = 0x00
[00:00:00.684,265] <inf> Lesson5_Exercise1: Reg[0x2d] = 0x00
[00:00:00.704,467] <inf> Lesson5_Exercise1: Reg[0x2e] = 0x00
[00:00:00.724,548] <inf> Lesson5_Exercise1: -------------------------------------------------------------
[00:00:00.724,578] <inf> Lesson5_Exercise1: Continuously read sensor samples, compensate, and display
[00:00:00.724,639] <inf> Lesson5_Exercise1: uncomp = 0 C
[00:00:01.724,761] <inf> Lesson5_Exercise1: uncomp = 0 C
[00:00:02.724,884] <inf> Lesson5_Exercise1: uncomp = 0 C
[00:00:03.725,097] <inf> Lesson5_Exercise1: uncomp = 0 C
Solid connection Short(SB11-SB14)