I am trying to read acceleration values from an acceleration sensor (IIM-42652) via SPI with nrf52832 as the SPI master. I created it based on the spi_pca10040 example, but the reading displayed in the terminal remains 0.
The development environment is SEGGER Embedded Studio for ARM V5.70a.
https://product.tdk.com/system/files/dam/doc/product/sensor/mortion-inertial/imu/data_sheet/ds-000440-iim-42652-typ-v1.1.pdf
https://www.murata.com/products/productdata/8813650903070/mbn52832.pdf?1659967311000
#include "nrf_drv_spi.h"
#include "app_util_platform.h"
#include "nrf_gpio.h"
#include "nrf_delay.h"
#include "boards.h"
#include "app_error.h"
#include <string.h>
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
#define SPI_SCK_PIN 3 //SCK
#define SPI_MISO_PIN 4 //SDO
#define SPI_MOSI_PIN 29 //SDI
#define SPI_SS_PIN 2 //SS
#define SPI_INSTANCE 0 /**< SPI instance index. */
static const nrf_drv_spi_t spi = NRF_DRV_SPI_INSTANCE(SPI_INSTANCE); /**< SPI instance. */
static volatile bool spi_xfer_done; /**< Flag used to indicate that SPI instance completed the transfer. */
#define TEST_STRING "Nordic"
static uint8_t m_tx_buf[] = TEST_STRING; /**< TX buffer. */
static uint8_t m_rx_buf[sizeof(TEST_STRING) + 1]; /**< RX buffer. */
static const uint8_t m_length = sizeof(m_tx_buf); /**< Transfer length. */
/**
* @brief SPI user event handler.
* @param event
*/
void spi_event_handler(nrf_drv_spi_evt_t const * p_event,
void * p_context)
{
spi_xfer_done = true;
printf("Transfer completed.\n");
if (m_rx_buf[0] != 0)
{
printf(" Received:\n");
NRF_LOG_HEXDUMP_INFO(m_rx_buf, strlen((const char *)m_rx_buf));
}
}
void imu_setup_IIM42652(){
memset(m_rx_buf, 0, m_length);
memset(m_tx_buf, 0, m_length);
spi_xfer_done = false;
/* WHO_AM_I = 0x6F */
m_tx_buf[0]=0x80|0x75;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, m_length, m_rx_buf, m_length));
whoami = m_rx_buf[0];
printf(" whoami:%02X\n", whoami);
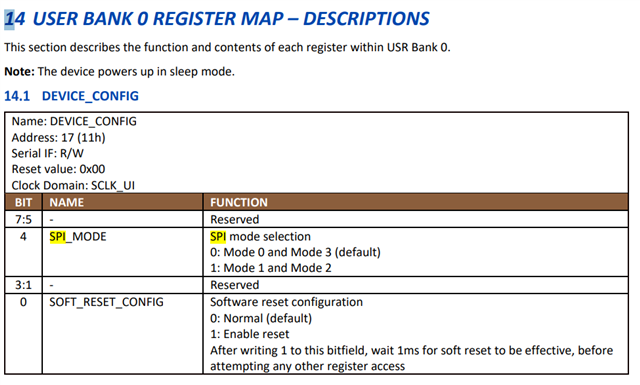
/* DEVICE_CONFIG
* SOFT_RESET_CONFIG[0] = 1(Enable Reset. wait 1ms)
*/
m_tx_buf[0] = 0x11;
m_tx_buf[1] = 0x01;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
nrf_delay_ms(10);
/* ACCEL_CONFIG0
* ACCEL_FS_SEL[7:5] = 2(±4g)
* ACCEL_ODR[3:0] = 9(50Hz:LN mode (default))
*/
m_tx_buf[0] = 0x50;
m_tx_buf[1] = 0x49;// 010(2) 0 1001(9) = 73(0x49)
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* PWR_MGMT0
* ACCEL_MODE[1:0] = 2(Low Power Mode)
*/
m_tx_buf[0] = 0x4E;
m_tx_buf[1] = 0x02;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* APEX_CONFIG0
* DMP_ODR[1:0] = 2(50Hz)
*/
m_tx_buf[0] = 0x56;
m_tx_buf[1] = 0x02;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* SIGNAL_PATH_RESET
* DMP_INIT_EN[6] = 0
* DMP_MEM_RESET_EN[5] = 1
*/
m_tx_buf[0] = 0x4B;
m_tx_buf[1] = 0x20;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
nrf_delay_ms(50); // 1msでよいはずだか、安定して動かすために50msとする。
/* SIGNAL_PATH_RESET
* DMP_INIT_EN[6] = 1
* DMP_MEM_RESET_EN[5] = 0
*/
m_tx_buf[0] = 0x4B;
m_tx_buf[1] = 0x40;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* REG_BANK_SEL
* BANK_SEL[2:0] = 4(BANK4)
*/
m_tx_buf[0] = 0x76;
m_tx_buf[1] = 0x04;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* INT_SOURCE6
* STEP_DET_INT1_EN[5] = 1
*/
m_tx_buf[0] = 0x4D;
m_tx_buf[1] = 0x20;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* REG_BANK_SEL
* BANK_SEL[2:0] = 0(BANK0)
*/
m_tx_buf[0] = 0x76;
m_tx_buf[1] = 0x00;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* APEX_CONFIG0
* PED_ENABLE[5] = 1
* DMP_ODR[1:0] = 2(50Hz)
*/
m_tx_buf[0] = 0x56;
m_tx_buf[1] = 0x22;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
/* TMST_CONFIG0
* TMST_TO_REGS_EN[4] = 1
*/
m_tx_buf[0] = 0x54;
m_tx_buf[1] = 0x33;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 2, NULL, 0));
}
int main(void)
{
bsp_board_init(BSP_INIT_LEDS);
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
NRF_LOG_DEFAULT_BACKENDS_INIT();
nrf_drv_spi_config_t spi_config = NRF_DRV_SPI_DEFAULT_CONFIG;
spi_config.ss_pin = SPI_SS_PIN;
spi_config.miso_pin = SPI_MISO_PIN;
spi_config.mosi_pin = SPI_MOSI_PIN;
spi_config.sck_pin = SPI_SCK_PIN;
spi_config.frequency = NRF_DRV_SPI_FREQ_8M;
spi_config.mode = NRF_DRV_SPI_MODE_0;
APP_ERROR_CHECK(nrf_drv_spi_init(&spi, &spi_config, spi_event_handler, NULL));
printf("SPI example started.\n");
imu_setup_IIM42652();
while (1)
{
// Reset rx buffer and transfer done flag
memset(m_rx_buf, 0, m_length);
spi_xfer_done = false;
m_tx_buf[0]=0x80|0x1F;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, m_length, m_rx_buf, m_length));
printf("Read Accelerometer:%02X%02X-%02X%02X-%02X%02X\n", m_rx_buf[0],m_rx_buf[1], m_rx_buf[2],m_rx_buf[3], m_rx_buf[4],m_rx_buf[5]);
while (!spi_xfer_done)
{
__WFE();
}
NRF_LOG_FLUSH();
bsp_board_led_invert(BSP_BOARD_LED_0);
nrf_delay_ms(200);
}
}
I have tried the following for possible causes:
・Assign pin connections with reference to the data sheet. Shuffling didn't solve the problem
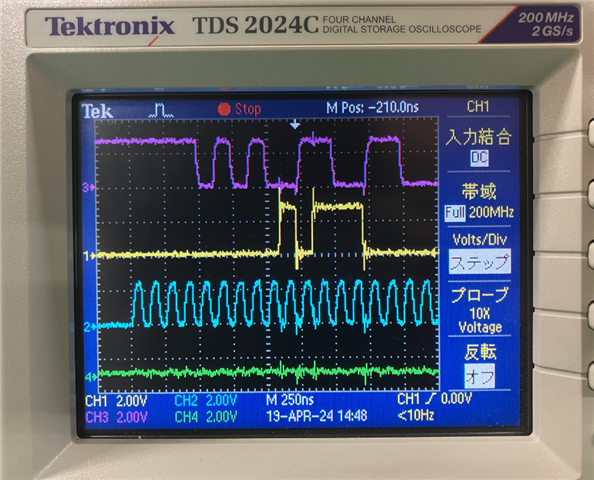
・When I checked the SPI communication waveform with an oscilloscope with the MBN52832 (WSM-BL241-ADA-008DK) module and sensor connected, I found that the CS, SCLK, and MOSI pins were normal, but the MISO pin was not normal.
・With the MBN52832 (WSM-BL241-ADA-008DK) module and sensor connected, the MISO pin was left unconnected, and the MISO of the acceleration sensor was used as the measurement point. When checking the SPI communication waveform with an oscilloscope, it was found that the , SCLK, and MOSI pins all appear to be working properly.
please help me. Thank you.