
Dear Support Team,
I'm trying to develop a mouse using Pixart's PAW3395 sensor. I've written functions for reading and writing data through the SPI interface. I took help from the bme280 example provided by Zephyr and the Nordic Dev Academy. The overlay remains approximately the same; however, because the power-up sequence of PAW3395 needs us to manually control the "cs" pin thus, I had to assign the cs to 2 nodes: one for the spi (spi1) and the led node (led4). Is there a better way to control the cs pin?
This is the overlay file:
/* STEP 2.1 - Create an overlay file for your board */
&i2c0 { status = "disabled";};
&spi0 { status = "disabled";};
&i2c1 { status = "disabled";};
&spi1 {
compatible = "nordic,nrf-spim";
status = "okay";
pinctrl-0 = <&spi1_default>;
pinctrl-1 = <&spi1_sleep>;
pinctrl-names = "default","sleep";
cs-gpios = <&gpio0 30 GPIO_ACTIVE_LOW>;
bme280: bme280@0{
compatible = "bosch,bme280";
reg = <0>;
spi-max-frequency = <125000>;
};
};
/* STEP 2.2 - Change the pin configuration */
&pinctrl {
spi1_default: spi1_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 28)>,
<NRF_PSEL(SPIM_MOSI, 0, 29)>,
<NRF_PSEL(SPIM_MISO, 0, 31)>;
};
};
spi1_sleep: spi1_sleep {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 28)>,
<NRF_PSEL(SPIM_MOSI, 0, 29)>,
<NRF_PSEL(SPIM_MISO, 0, 31)>;
low-power-enable;
};
};
};
/{
buttons {
compatible = "gpio-keys";
button4: button_4 {
gpios = <&gpio0 27 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Push button switch 4";
zephyr,code = <INPUT_KEY_4>;
};
};
leds {
compatible = "gpio-leds";
led4: led_4 {
gpios = <&gpio0 30 GPIO_ACTIVE_LOW>;
label = "Green LED 4";
};
led5: led_5 {
gpios = <&gpio0 26 GPIO_ACTIVE_LOW>;
label = "Green LED 5";
};
};
/* These aliases are provided for compatibility with samples */
aliases {
sw4 = &button4;
led4 = &led4;
led5 = &led5;
};
};
And this is how I'm currently doing the power-up sequence:
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(DT_ALIAS(led0), gpios);
static const struct gpio_dt_spec motion_pin = GPIO_DT_SPEC_GET(MOTION_NODE, gpios);
static const struct gpio_dt_spec ncs_pin = GPIO_DT_SPEC_GET(DT_ALIAS(led4), gpios);
static const struct gpio_dt_spec nreset_pin = GPIO_DT_SPEC_GET(DT_ALIAS(led5), gpios);
const struct spi_dt_spec spispec = SPI_DT_SPEC_GET(DT_NODELABEL(bme280), SPIOP, 0);
const struct motion_burst *pMotionBurstData;
static void power_up_sequence(void){
k_msleep(50);
//drive NCS pin high and then low
gpio_pin_set_dt(&ncs_pin,1);
k_msleep(1);
gpio_pin_set_dt(&ncs_pin,0);
paw_write_reg(POWER_UP_RESET_REG, 0x5A);
k_msleep(5);
power_up_init_reg();
uint8_t value;
for(uint8_t i = 0x02; i<=0x06; i++){
paw_read_regs(i, value, 1);
}
}
void cb(const struct device *dev, struct gpio_callback *cb, uint32_t pins){
//read motion burst
// update_values_motion_burst();
gpio_pin_toggle_dt(&led);
}
int main(void)
{
int err;
if (!gpio_is_ready_dt(&led) || !gpio_is_ready_dt(&motion_pin) || !gpio_is_ready_dt(&ncs_pin)) {
return 0;
}
err = spi_is_ready_dt(&spispec);
if (!err) {
LOG_ERR("Error: SPI device is not ready, err: %d", err);
return 0;
}
gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
gpio_pin_configure_dt(&ncs_pin, GPIO_OUTPUT_ACTIVE);
gpio_pin_configure_dt(&nreset_pin, GPIO_OUTPUT_ACTIVE);
gpio_pin_configure_dt(&motion_pin, GPIO_INPUT);
gpio_pin_set_dt(&nreset_pin,1);
k_usleep(10);
gpio_pin_set_dt(&nreset_pin,0);
power_up_sequence(); //Power on reset for the sensor
gpio_pin_interrupt_configure_dt(&motion_pin, GPIO_INT_EDGE_TO_ACTIVE);
static struct gpio_callback motion_cb_data;
gpio_init_callback(&motion_cb_data,cb,BIT(motion_pin.pin));
gpio_add_callback(motion_pin.port, &motion_cb_data);
uint8_t x[12] = {1,2,3,4,5,6,7,8,9,10,11,12};
pMotionBurstData = &x;
while (1) {
// LOG_INF("%d\n%d\n%d\n%d", pMotionBurstData->Del_X_H, pMotionBurstData->Del_X_L, pMotionBurstData->Del_Y_H, pMotionBurstData->Del_Y_L);
// update_values_motion_burst();
uint8_t val=0;
LOG_INF("Values are:\n");
paw_read_regs(0x0C,val,1); //default value 0x01
LOG_INF("%x\n",val);
// paw_read_regs(0x02,&val,1);
// LOG_INF("%x\n",val);
// paw_read_regs(0x03,&val,1);
// LOG_INF("%x\n",val);
// paw_read_regs(0x04,&val,1);
// LOG_INF("%x\n",val);
// paw_read_regs(0x05,&val,1);
// LOG_INF("%x\n",val);
k_msleep(SLEEP_TIME_MS);
}
return 0;
}This is the power-up Sequence as described in the datasheet:
The power-up initialisation mentioned in point 6 basically involves writing to a bunch of registers on the PAW3395.
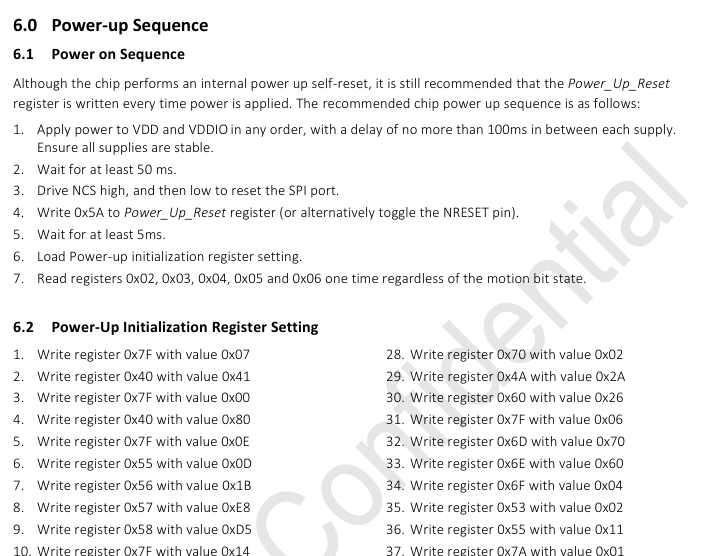
What is the best method to do step 3 in the sequence?
Thank you in advance,
Regards

