Hello,
I am creating a new project that uses the nRF52810 as my controller, and during the development stage, I am using the PCA10040 nRF52832 development board. (I read somewhere that we can flash the nRF52810 code into the nRF52832 PCA10040 development board). My requirement is a simple LED indicator based on delay commands from an APK that uses the Nordic UART service to send and receive data. I added the timer peripheral to the ble_app_uart example project from the directory nRF5_SDK_17.0.2_d674dde\examples\ble_peripheral\ble_app_uart\pca10040e\s112\ses and flashed the code onto the PCA10040 nRF52832 development board to test it. The code works perfectly.
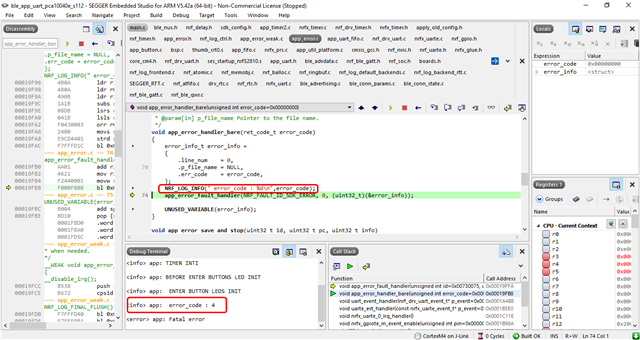
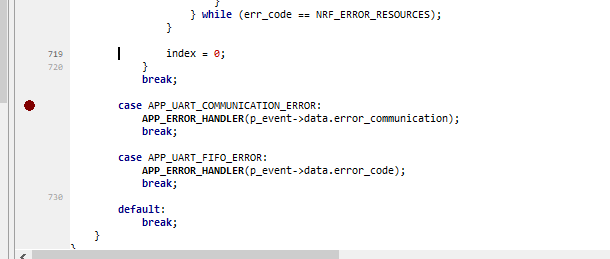
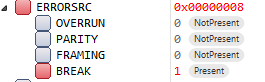
Then I took an nRF52810 custom PCB and connected the JTAG. The board is able to detect and erase the chip. When I flash the code onto the board, the IDE shows "flash successful," but the board is not working. Are there any other conditions for flashing the code into the nRF52810 custom board? Your response is valuable.
SDK version: 17.0.2
SEGGER Embedded Studio version: 5.42a