Hi,
I am using the NRF52832 DK version 3.0.0 with a UWB module: the DWM1000 from Qorvo.
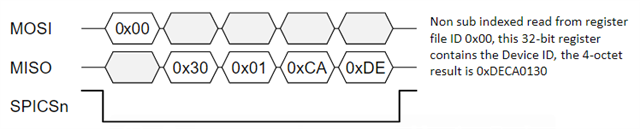
I was struggling with the SPI communication to get the Chip ID by sending a simple 0x00 byte through the MOSI line. I have tried with nrfx_spi alone, but
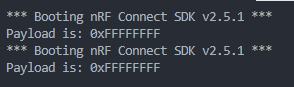
no success for now. I share my code, which is written in zephyr, it should work but I always receive a 0xFFFFF. I tested the qorvo module with arduino and
it seems to work fine, as I am getting the expected results; as a result, the problem seems to be my code or the board. (I am using the NrfConnect for VScode)
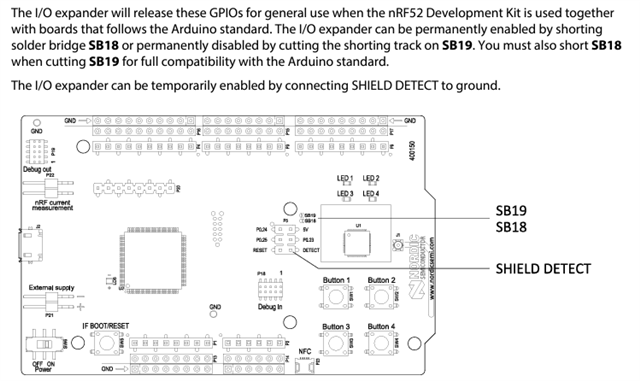
I also followed the instruction in the User Guide where it is said that I should enable the I/O expander to avoid any problem with the buttons and leds in the board
which uses the SPI pins also.
source: infocenter.nordicsemi.com/.../nRF52_DK_User_Guide_v1.2.pdf

&pinctrl {
spi_master_default: spi_master_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 25)>,
<NRF_PSEL(SPIM_MOSI, 0, 23)>,
<NRF_PSEL(SPIM_MISO, 0, 24)>;
};
};
spi_master_sleep: spi_master_sleep {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 25)>,
<NRF_PSEL(SPIM_MOSI, 0, 23)>,
<NRF_PSEL(SPIM_MISO, 0, 24)>;
low-power-enable;
};
};
};
spi2_master: &spi2 {
compatible = "nordic,nrf-spi";
status = "okay";
pinctrl-0 = <&spi_master_default>;
pinctrl-1 = <&spi_master_sleep>;
pinctrl-names = "default", "sleep";
cs-gpios = <&gpio0 22 GPIO_ACTIVE_HIGH>;
reg_spi2_master: spi-dev-a@0 {
reg = <0>;
};
};
#include <stdio.h>
#include <string.h>
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/drivers/spi.h>
/* 1000 msec = 1 sec */
#define SLEEP_TIME_MS 1000
#define ZEPHYR_MHZ_TO_HZ(freq) ((freq) * 1000 * 1000)
#define QORVO_CHIPID_REG 0x00
#define MY_SPI_MASTER DT_NODELABEL(spi2)
// SPI master functionality
const struct device *spi_dev = DEVICE_DT_GET(MY_SPI_MASTER);
// Chip select functionality
#define MY_GPIO0 DT_NODELABEL(gpio0)
#define GPIO_0_CS 22
static const struct device *gpio0_dev = DEVICE_DT_GET(MY_GPIO0);
struct spi_config spi_cfg = {
.operation = SPI_TRANSFER_MSB | SPI_WORD_SET(8),// | SPI_MODE_CPOL | SPI_MODE_CPHA,
.frequency = 2000000U,
.slave = 0,
//.cs = NULL,
};
void print_buffer(uint32_t readlength, uint8_t *readBuffer){
int j = 0;
printf("Payload is: ");
for(int loop = readlength; loop > 0; loop--){
j = (j << 8) | readBuffer[loop];
}
printf("0x%.8X \t\n", j);
}
int readfromspi(uint8_t reg, uint8_t values[], uint8_t size)
{
int err;
uint8_t tx_buffer[1];
tx_buffer[0] = reg;
struct spi_buf tx_buf[] = {
{.buf = tx_buffer, .len = sizeof(tx_buffer),}
};
struct spi_buf_set tx = {
.buffers = tx_buf,
.count = 1
};
struct spi_buf rx_buf[] = {
{.buf = values, .len = size,}
};
struct spi_buf_set rx = {
.buffers = rx_buf,
.count = 1
};
gpio_pin_set(gpio0_dev, GPIO_0_CS, 0);
// Start transaction
err = spi_write(spi_dev, &spi_cfg, &tx);
if(err<0){
printk("SPI transaction error: %i\n", err);
return err;
}
err = spi_read(spi_dev, &spi_cfg, &rx);
if(err<0){
printk("SPI receive error: %i\n", err);
return err;
}
gpio_pin_set(gpio0_dev, GPIO_0_CS, 1);
return 0;
}
static void readChipID(void){
uint8_t rx_buff_chipid[5];
readfromspi(QORVO_CHIPID_REG,rx_buff_chipid,5);
//printk("ChipID: 0x%02X\n");
print_buffer(5, rx_buff_chipid);
}
int main(void)
{
gpio_pin_configure(gpio0_dev, GPIO_0_CS, GPIO_OUTPUT);
gpio_pin_set(gpio0_dev, GPIO_0_CS, 1);
if(!device_is_ready(spi_dev)) {
printk("SPI master device not ready!\n");
}
readChipID();
k_msleep(SLEEP_TIME_MS);
while (1) {
k_msleep(SLEEP_TIME_MS);
}
return 0;
}
Please, I need some suggestions about the code or configuration. Probably I am misunderstanding something.